


Khi xây dựng một robot VEX IQ tùy chỉnh, đôi khi bạn chỉ đơn giản cần thêm sức mạnh. Một cách dễ dàng để làm điều này là thêm một động cơ (motor) nữa. Hai động cơ hoạt động cùng nhau được gọi là nhóm động cơ (motor group).
Cách các nhóm động cơ được liên kết về mặt cơ khí
(How motor groups are mechanically tied together)
Để hai động cơ làm việc cùng nhau, chúng cần được kết nối cơ khí (mechanically connected) theo một cách nào đó.
Một số phương pháp kết nối hai động cơ với nhau về mặt cơ khí bao gồm:
Cả hai động cơ chia sẻ cùng một trục truyền động song song (parallel drive shaft), làm việc cùng nhau để cung cấp đầu ra công suất ổn định và cao hơn. Khi dùng chung trục truyền động, mô-men xoắn (torque) và công suất kết hợp của cả hai động cơ được sử dụng hiệu quả hơn, dẫn đến tăng công suất đầu ra và hiệu suất nhất quán hơn.
Cả hai động cơ chia sẻ cùng một bộ bánh răng (gear set), giúp tăng tốc độ. Dù dùng chung bộ bánh răng, mỗi động cơ vẫn có thể được điều chỉnh độc lập để tăng độ chính xác và kiểm soát chuyển động. Hai động cơ gắn vào một bộ bánh răng tăng mô-men xoắn, giúp robot dễ dàng thực hiện các nhiệm vụ như nâng vật nặng.
Cả hai động cơ dùng chung hệ thống xích và nhông (chain and sprocket system), giúp robot truyền mô-men xoắn dễ dàng hơn. Cấu hình này cũng tăng độ ổn định và giảm ma sát, dẫn đến hiệu quả cơ khí cao hơn. Thiết kế này còn gọn hơn, cho phép thiết kế liền mạch và hiệu quả hơn cũng như linh hoạt hơn.
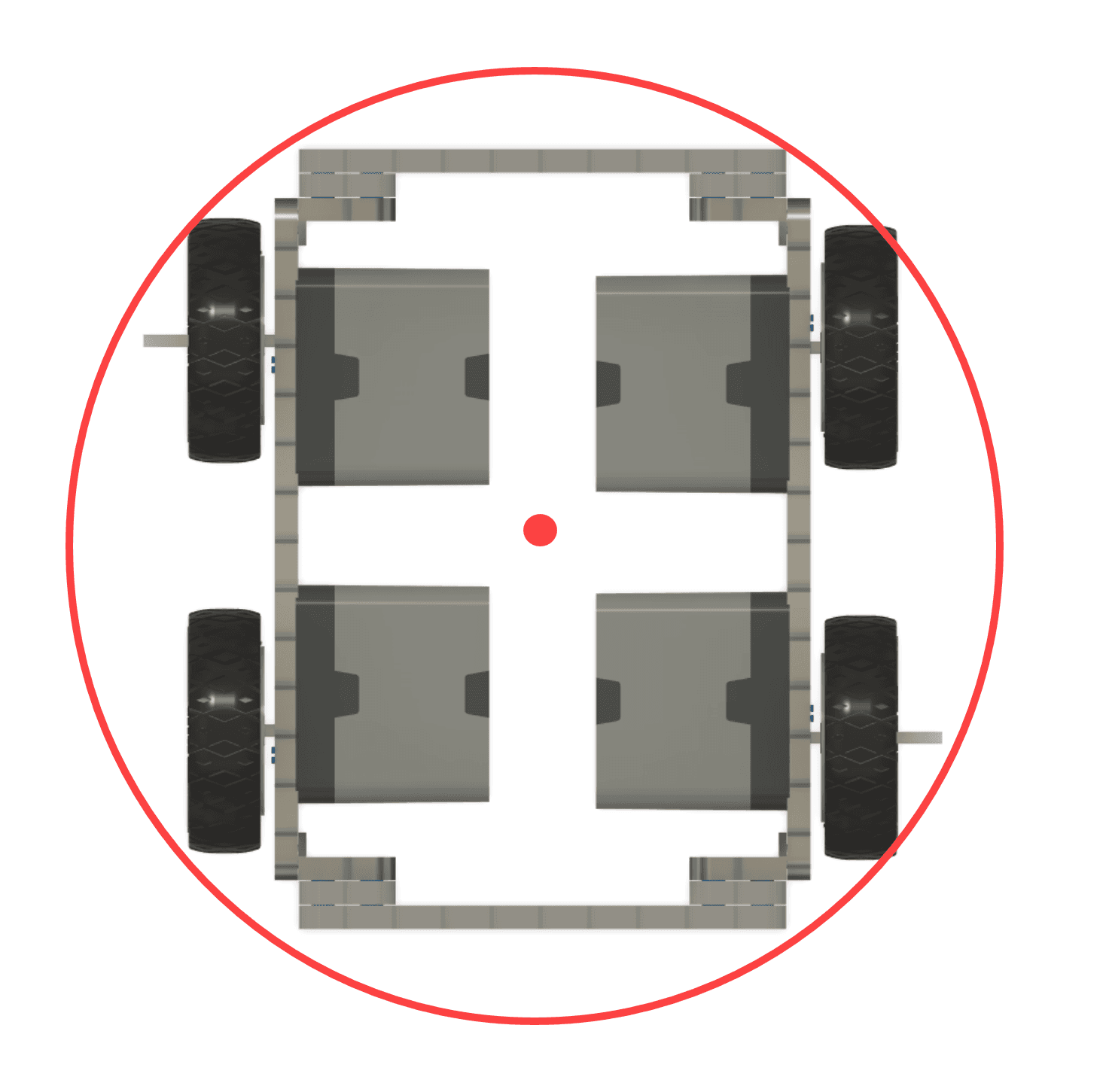
Cả hai động cơ có bánh xe gắn ở cùng một phía của drivetrain (hệ truyền động). Nguyên lý này được minh họa trong một ví dụ 3D Build.
Tầm Quan Trọng của Hướng Quay Động Cơ
(The importance of motor spin direction)
Khi hai động cơ làm việc cùng nhau, điều rất quan trọng là hướng quay của mỗi động cơ không được "chống lại nhau". Cách các động cơ được đặt theo hướng tương đối sẽ quyết định mỗi động cơ cần quay theo hướng nào để làm việc cùng nhau.
Ví dụ: trên cánh tay robot (robot arm) điển hình với hai động cơ cùng nâng cánh tay:
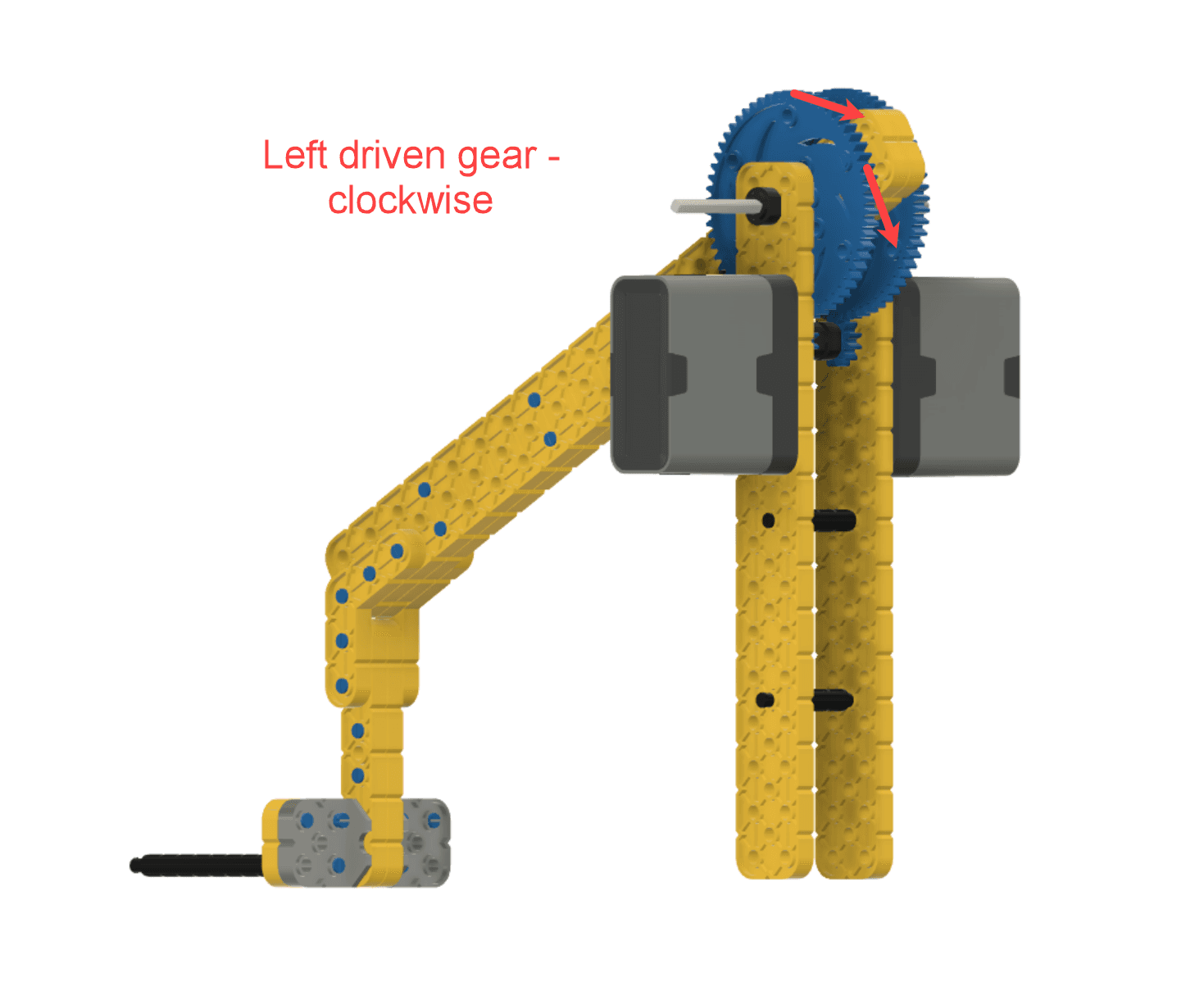
Bánh răng bị động (driven gear) gắn ở phía bên phải của cánh tay cần quay ngược chiều kim đồng hồ để nâng cánh tay. Vì bánh răng dẫn động (driving gear) phải quay theo hướng ngược lại so với bánh răng bị động, nên động cơ phía phải sẽ cần quay theo chiều kim đồng hồ để quay bánh răng dẫn động nhỏ.
Ở phía bên trái của cánh tay, bánh răng bị động sẽ cần quay theo chiều kim đồng hồ. Điều này cũng có nghĩa là động cơ phía trái sẽ cần quay ngược chiều kim đồng hồ.
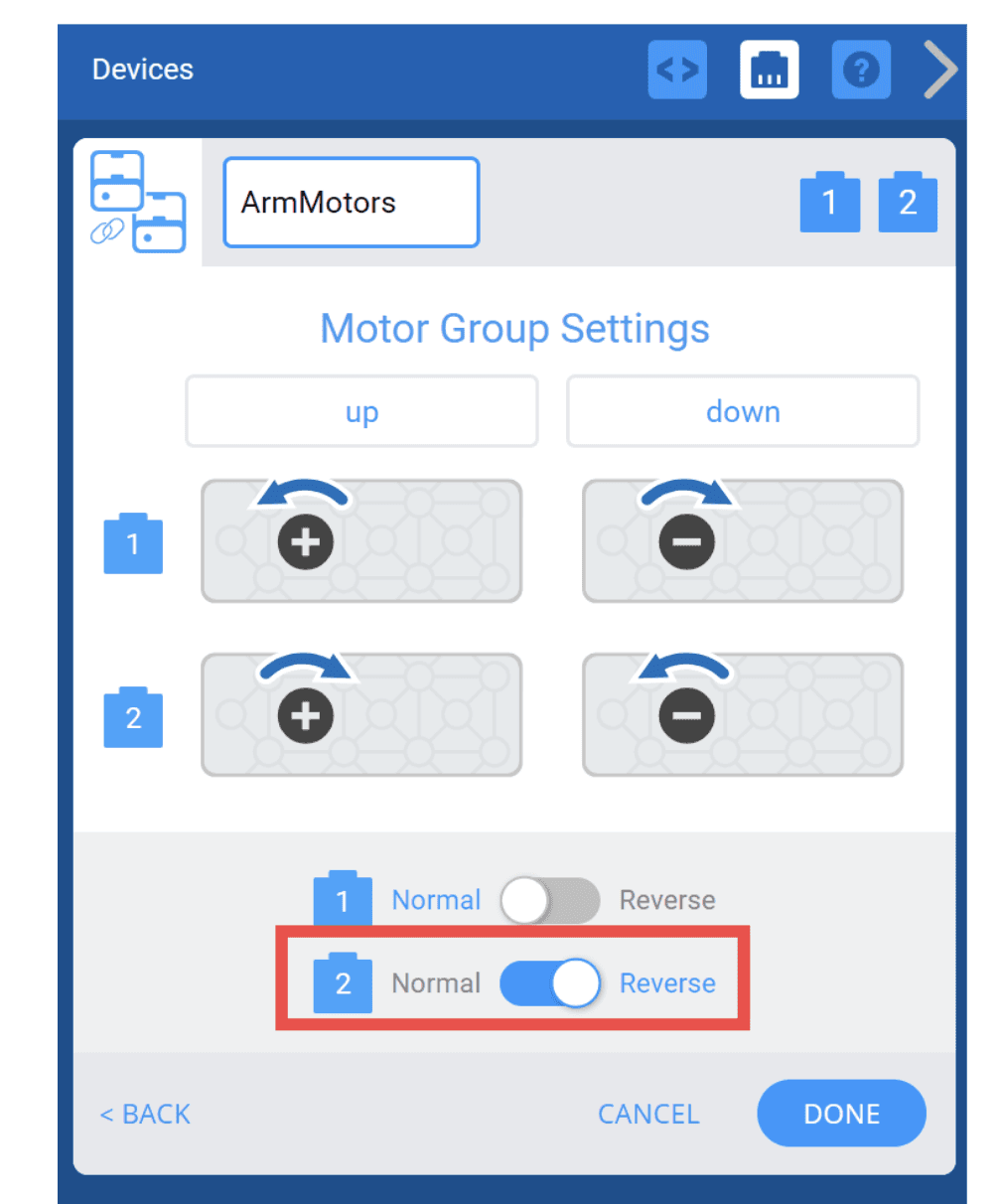
Như quy tắc chung, nếu hai động cơ trong nhóm động cơ đối diện nhau, như trong ví dụ với cánh tay ở trên, hướng quay của một động cơ trong nhóm phải bị đảo lại để các động cơ không chống lại nhau.
Nếu các động cơ hướng cùng một phía, thì cả hai động cơ trong nhóm sẽ cần quay cùng hướng.
Khi sử dụng VEXcode IQ, việc đảo chiều quay động cơ (reverse a motor) trong một nhóm động cơ rất đơn giản — có thể thực hiện được ngay khi bạn thêm nhóm động cơ làm một thiết bị (device).
Các Ứng Dụng mà Nhóm Động Cơ Sẽ Hữu Ích
(Applications in which motor groups will be helpful)
Nguyên lý lợi thế cơ học (mechanical advantage) cho chúng ta biết rằng nhóm động cơ sẽ hữu ích trong những tình huống khi:
Cần nâng nhiều trọng lượng hơn.
Cần di chuyển quãng đường xa hơn.
Cần tăng tốc độ.
Cần tăng lực/áp lực (force).
Những nguyên lý này có thể thấy rõ ở cánh tay robot cũng như drivetrain (hệ truyền động).
Cánh tay Robot
(Robot arms)
Một cánh tay swing đơn (single swing arm) có thể nâng vật nhẹ chỉ với một động cơ. Tuy nhiên, nếu cánh tay cần nâng vật nặng hơn, một động cơ thứ hai có thể là cần thiết.
Khi thiết kế những cánh tay nâng tiên tiến như six-bar hoặc double-reverse four bar, thường sẽ cần hai động cơ. Nguyên nhân là bởi những cánh tay này có thể nâng vật cao hơn và nhanh hơn.
Drivetrains (Hệ truyền động)
Khi thiết kế một drivetrain bạn có thể muốn tăng tốc độ, leo dốc dốc hơn, hoặc đẩy mạnh hơn với robot của bạn. Một drivetrain với bốn động cơ sẽ giúp bạn đạt được những điều này.
VEXcode IQ có một thiết bị đặc biệt DRIVETRAIN 4-motor để cho phép bạn lập trình drivetrain này.

Tuy nhiên, thiết bị 4-Motor Drivetrain giới hạn robot chỉ thực hiện pivot turns (quay tại chỗ bằng trục chính). Nếu robot của bạn cần các kiểu quay khác, thì motor groups (nhóm động cơ) có thể cho phép thực hiện điều đó.
Sử Dụng Nhóm Động Cơ cho các Loại Quay Khác Nhau
(Using Motor Groups for different types of turns)
Một robot skid-steer (lái trượt) là robot quay bằng cách điều chỉnh tốc độ và hướng của các bánh xe dẫn động ở mỗi bên. Các loại quay gồm:
 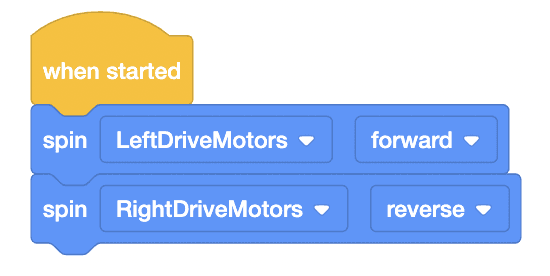 | Pivot turns (Quay tại chỗ): Robot quay quanh điểm trung tâm giữa các bánh xe dẫn động — xảy ra khi bánh xe dẫn động một bên quay ngược chiều so với bên kia. Loại quay này hữu ích khi robot cần quay tại chỗ. |
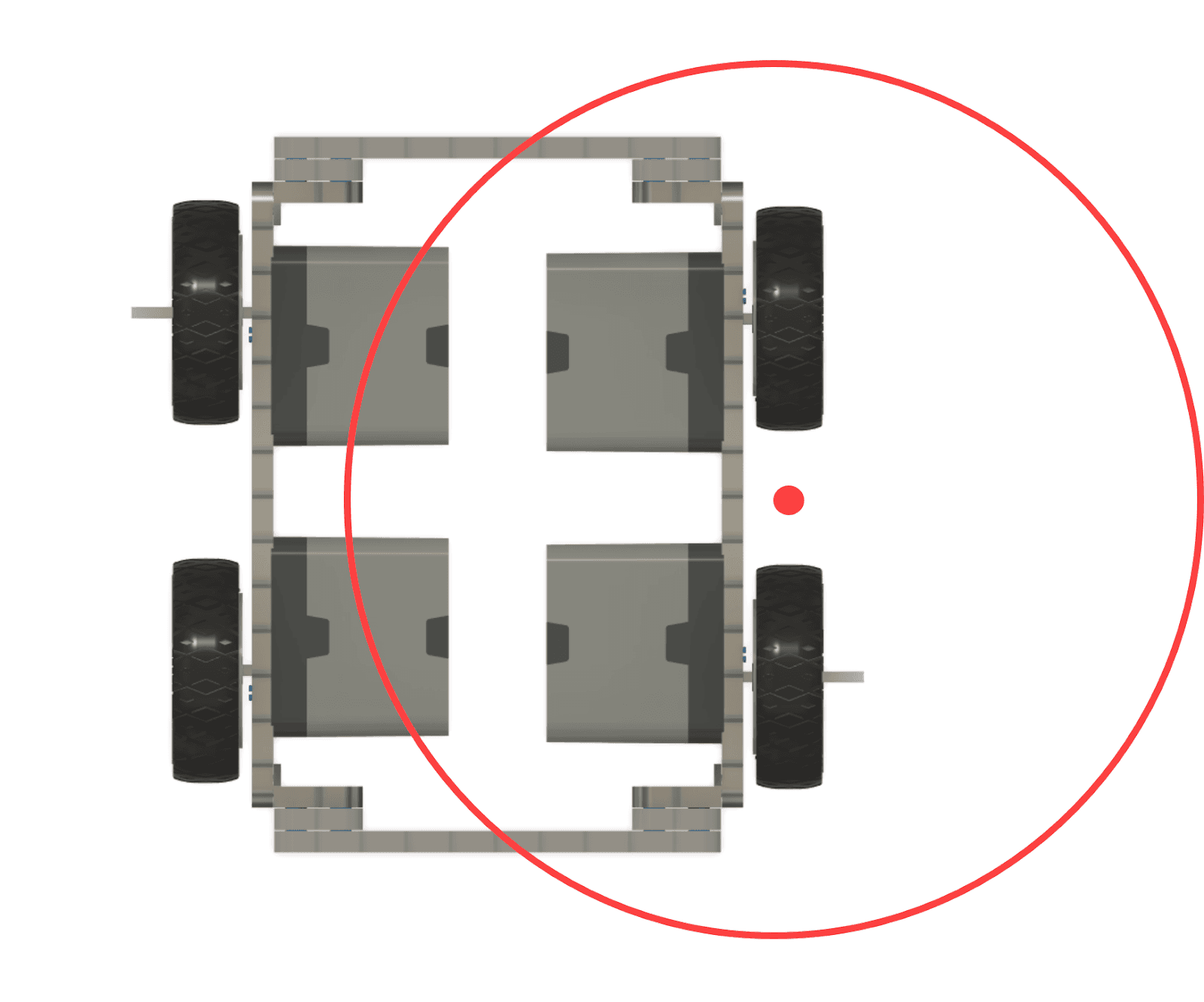 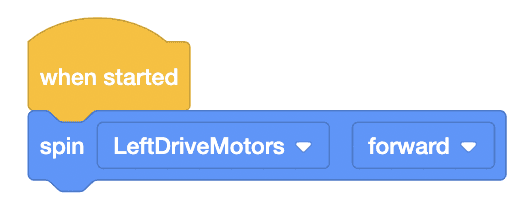 | Drag turns (Quay kéo): Trọng tâm quay nằm bên cạnh robot — xảy ra khi bánh xe ở một phía quay tiến hoặc lùi và bánh phía còn lại không di chuyển. Loại quay này hữu ích khi định vị với một mảnh trò chơi (game piece). |
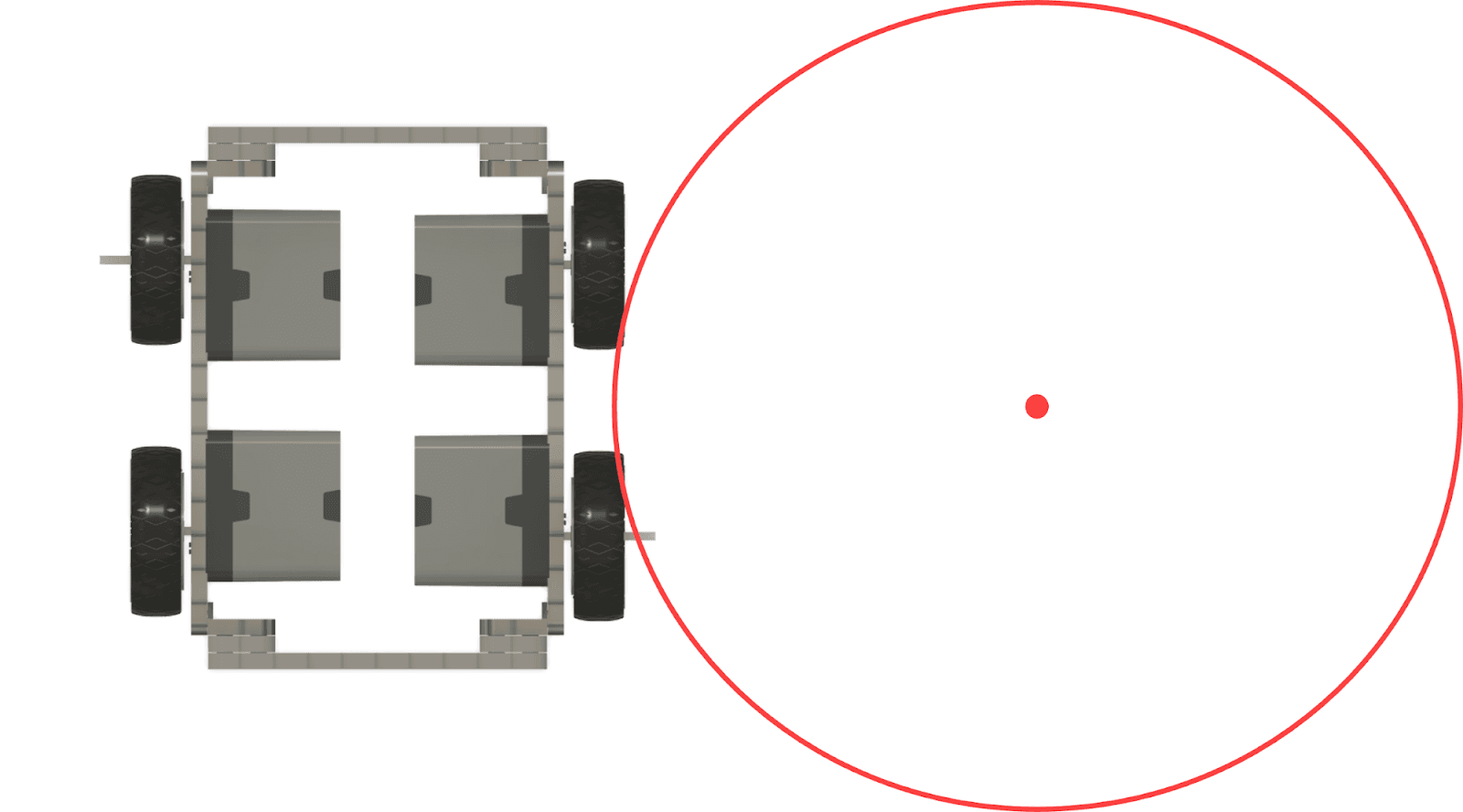 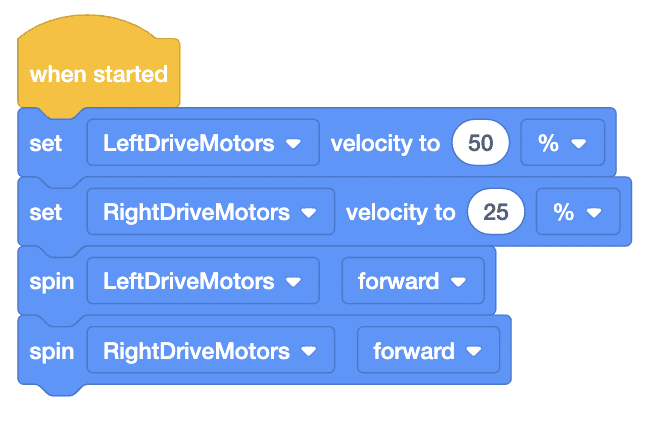 | Arc turns (Quay theo cung): Điểm quay nằm ngoài drivetrain — xảy ra khi bánh xe một bên quay nhanh hơn hoặc chậm hơn so với bánh xe bên kia. Loại quay này cho phép quãng đường di chuyển ngắn hơn khi điều hướng quanh chướng ngại vật. |