


Có nhiều cách khác nhau để bạn có thể xây dựng một cánh tay robot và gắn vào robot VEX IQ của mình. Cánh tay robot là một cơ cấu hoặc máy móc có chuyển động tương tự như cánh tay con người. Nó có thể được sử dụng để nhặt, di chuyển và vận chuyển vật thể. Cánh tay robot thường được gắn vào một tháp (tower) trên khung gầm (chassis) và dùng để nâng một bộ phận thao tác (manipulator) khác ở đầu cánh tay. Cánh tay cũng có thể được dùng để nâng cả robot khỏi mặt đất. Xem hoạt ảnh (animation) bên dưới để thấy ví dụ về phạm vi chuyển động của một cánh tay robot.
Động cơ thường được gắn vào tháp và truyền động thông qua hệ bánh răng (gear train) hoặc hệ nhông – xích (chain and sprocket system) để di chuyển cánh tay. Cánh tay cũng có thể sử dụng dây thun (rubber bands) để hỗ trợ nâng. Cánh tay robot VEX IQ thường được lắp ráp từ các Beam hoặc Large Beam. Cánh tay có thể chỉ gồm một cụm Beam duy nhất, hoặc hai cánh tay được ghép song song với nhau và có một thanh nối (span) ở giữa. Các thanh gia cường chéo (cross supports) được tạo bằng Standoff hoặc Corner Connector có thể được dùng để liên kết cặp cánh tay này.
Xem bên dưới để tham khảo các ví dụ về nhiều loại cánh tay khác nhau có thể xây dựng bằng bộ VEX IQ Kit.
Swing Arm (Cánh tay xoay)
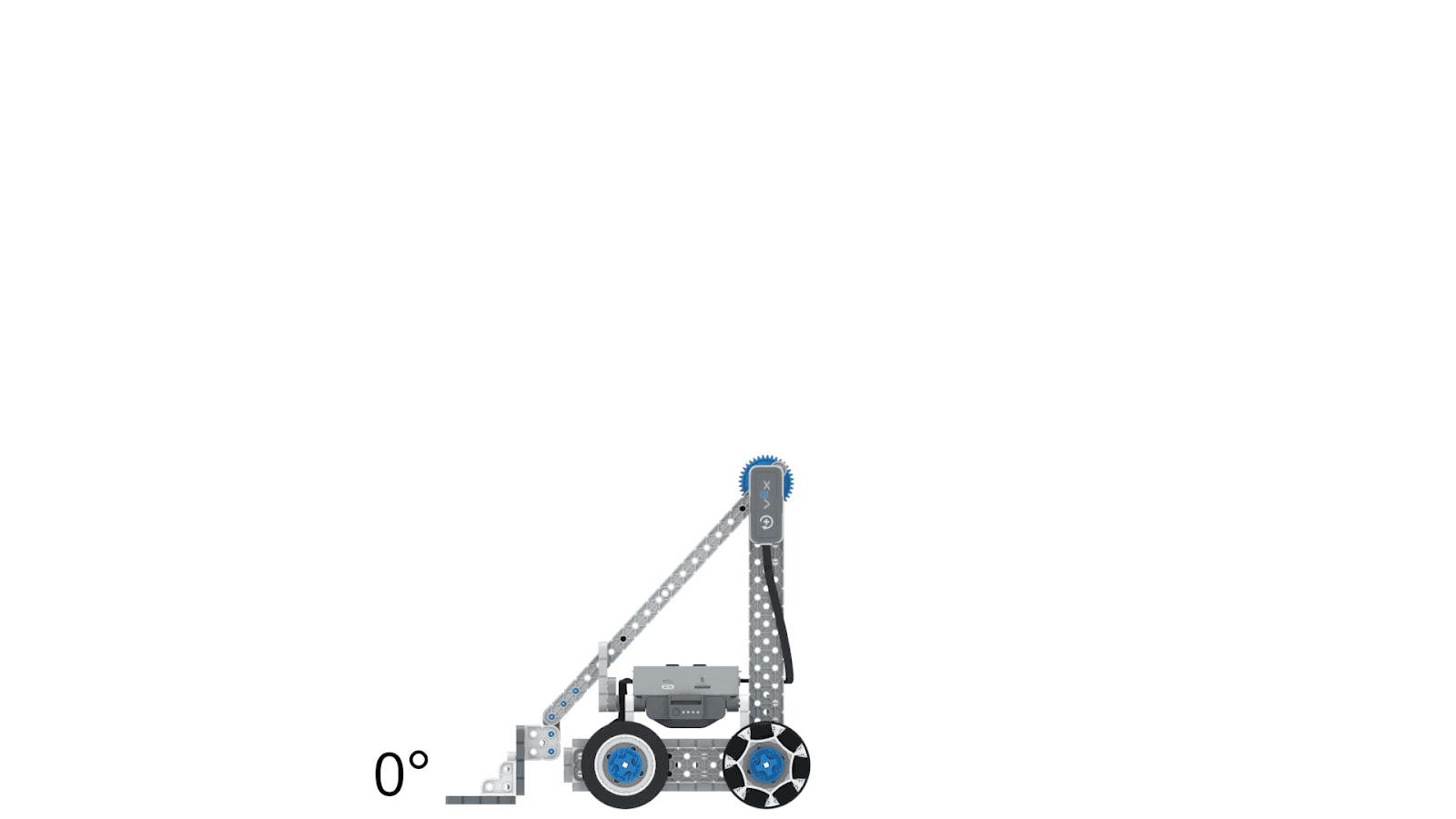
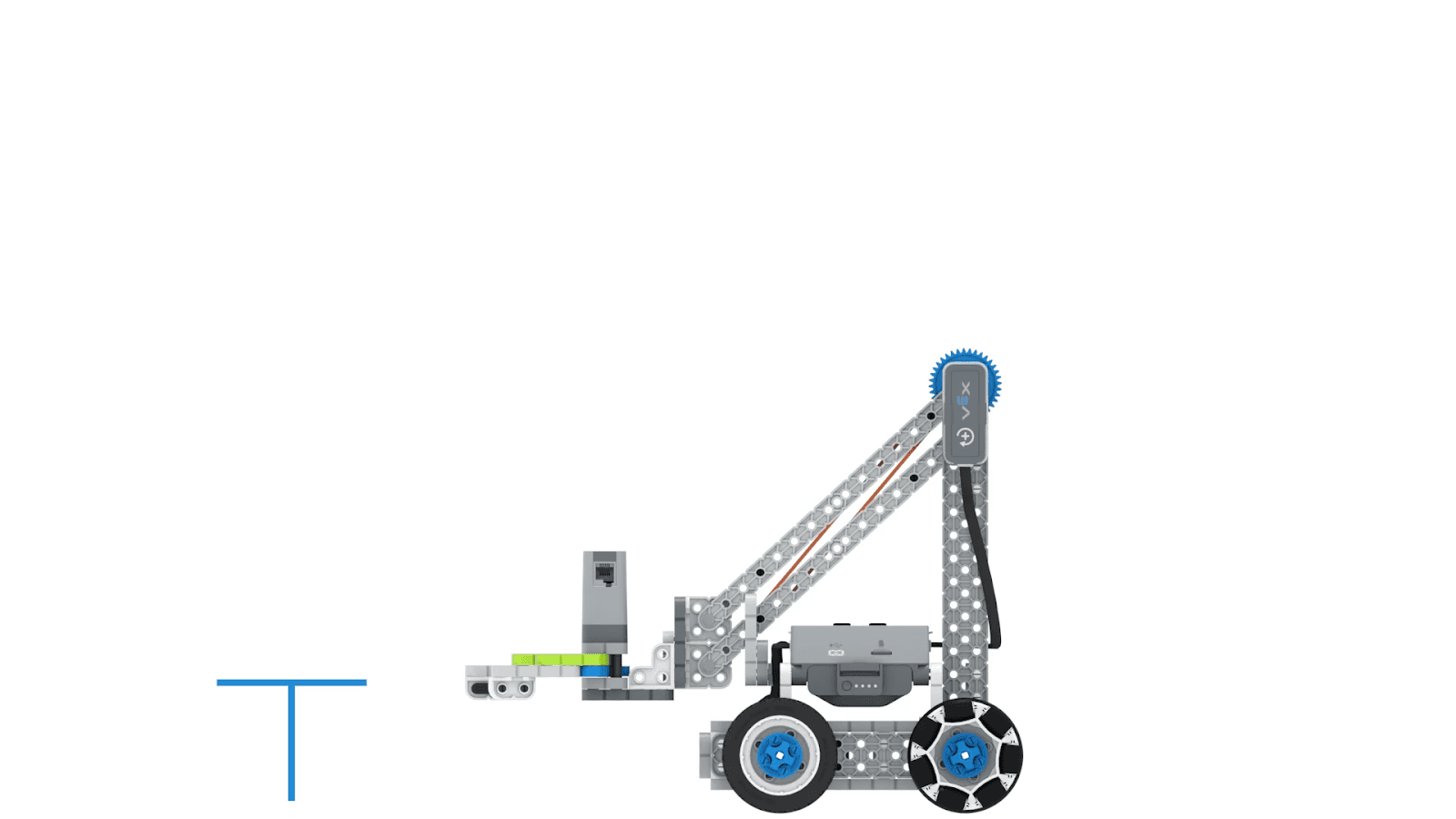
Cánh tay xoay đơn là loại cánh tay có lẽ dễ lắp ráp nhất. Đây là loại cánh tay được sử dụng trên mẫu ClawBot IQ (thế hệ 1). Bộ phận thao tác ở đầu cánh tay sẽ di chuyển theo quỹ đạo cung tròn của chuyển động xoay. Một thiết kế cánh tay xoay có thể vượt qua phía trên tháp và vươn sang phía đối diện của robot, như thể hiện trong hoạt ảnh này.
Tuy nhiên, chuyển động này có thể gây vấn đề đối với các bộ phận thụ động như càng (fork), muỗng (scoop) hoặc vật thể thi đấu cần giữ ở trạng thái cân bằng.
Linkage Arms (Cánh tay liên kết)
Cánh tay liên kết là loại cánh tay có nhiều hơn một thanh quay quanh trục, tạo thành các liên kết giữa tháp và tháp đầu (end tower).
Hình ảnh góc nghiêng của một cánh tay liên kết sử dụng hai thanh quay và một tay kẹp dạng fork để nâng vật thể.
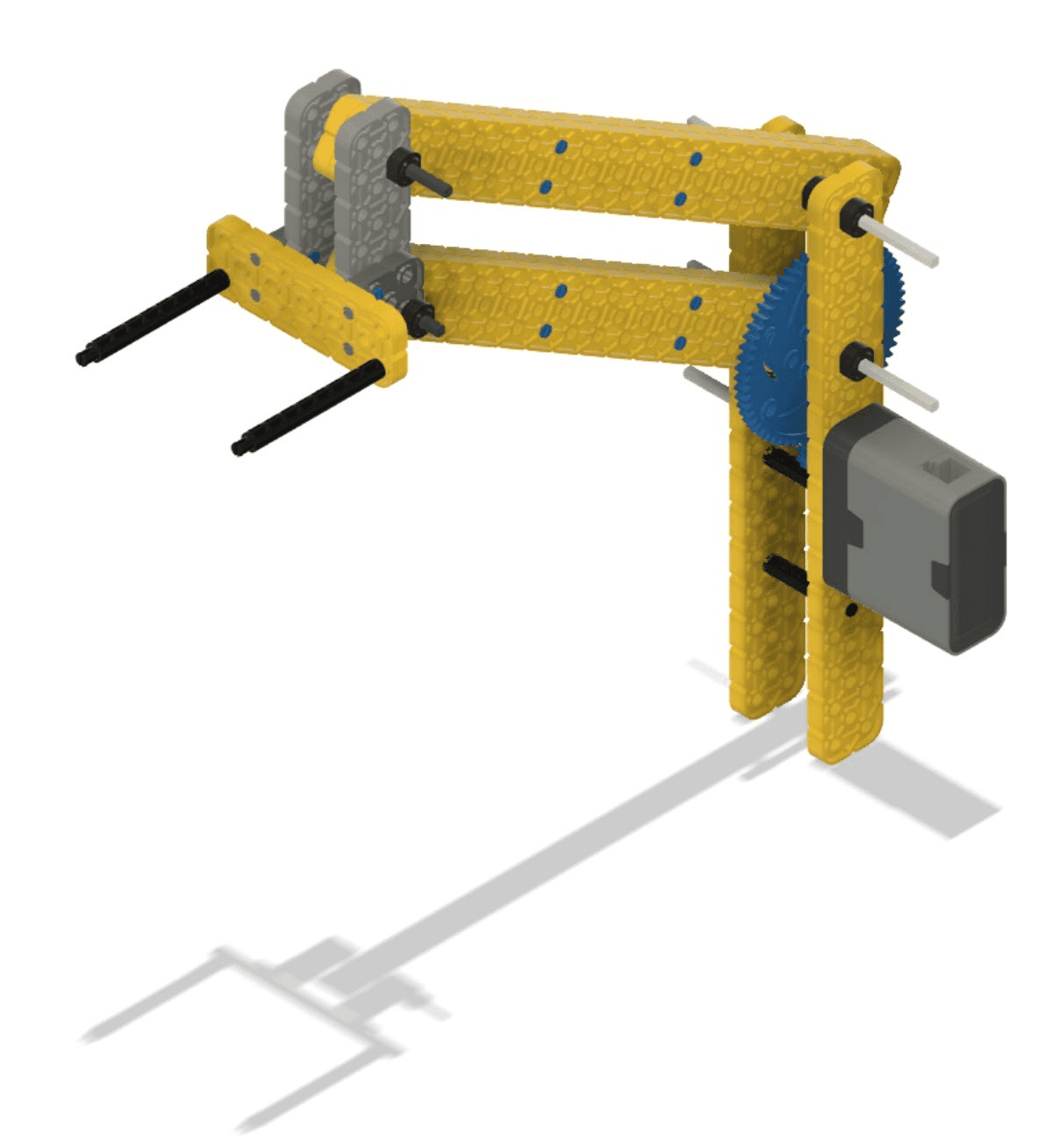
Các liên kết này thường được thiết kế tạo thành hình bình hành (parallelogram).
Khi các thanh và các tháp có cùng khoảng cách giữa các liên kết song song, chúng sẽ giữ được trạng thái song song trong quá trình nâng. Điều này giúp vật thể được nâng giữ tương đối cân bằng. Tuy nhiên, cánh tay vẫn di chuyển theo một cung tròn nhỏ khi nâng.
Những cánh tay này bị giới hạn về độ cao nâng vì đến một thời điểm nào đó, các thanh song song sẽ chạm vào nhau.
Cánh tay liên kết bao gồm các loại: 4-bar, 6-bar, chain bar và double reverse 4-bar. Xem bên dưới để tham khảo các biến thể cánh tay robot này.
4-Bar
Cánh tay 4-bar là loại dễ lắp ráp nhất nhờ cấu trúc đơn giản gồm hai cặp thanh song song. Cấu trúc này cũng giúp tăng độ ổn định và cho phép cánh tay có phạm vi chuyển động lớn. Cánh tay 4-bar bao gồm phần kết nối với tháp, một cặp tay liên kết song song và phần kết nối với tháp đầu/bộ phận thao tác. Mô hình 3D Build này cung cấp cái nhìn chi tiết về cấu trúc của cánh tay 6-bar (theo thiết kế tham chiếu).
Một ví dụ về cánh tay 4-bar có thể thấy trên ClawBot (thế hệ 2). Để lắp ráp ClawBot, bạn có thể làm theo các bước trong hình minh họa bên dưới hoặc xem hướng dẫn lắp ráp 2D (2D Build Instructions).
6-Bar
Cánh tay 6-bar là phiên bản mở rộng của cánh tay liên kết 4-bar. Nó được tạo ra bằng cách sử dụng một thanh trên dài hơn và một thanh đầu mở rộng trong bộ liên kết đầu tiên. Thanh dài hơn đóng vai trò là liên kết dưới cho bộ liên kết thứ hai, và thanh đầu mở rộng đóng vai trò như một “tháp” cho hai liên kết trên còn lại. Mô hình 3D Build này cung cấp cái nhìn chi tiết về cấu trúc của cánh tay 6-bar.
Cánh tay 6-bar thường có thể vươn cao hơn so với cánh tay 4-bar, tuy nhiên chúng cũng vươn ra xa hơn khi nâng lên và có thể làm robot bị lật nếu chiều dài cơ sở (wheelbase) không đủ lớn.
Chain-Bar (Cánh tay thanh xích)
Cánh tay chain-bar sử dụng nhông (sprocket) và xích (chain) để tạo thành một cánh tay liên kết. Một trục có nắp (capped shaft) được đưa xuyên qua tháp. Một nhông được gắn vào tháp và lắp lên phần nắp của trục. Cách này cho phép trục quay tự do trong khi nhông vẫn được cố định vào tháp. Trục được cố định với cánh tay, và một động cơ với hệ nhông – xích hoặc hệ bánh răng được dùng để nâng và hạ cánh tay.
Một trục quay tự do khác được đưa xuyên qua đầu còn lại của cánh tay. Bộ phận thao tác ở đầu được gắn vào một nhông thứ hai có cùng kích thước. Khi xích được nối giữa hai nhông của cánh tay, xích sẽ hoạt động giống như một liên kết 4-bar khi hệ động cơ quay cánh tay.
Bạn có thể cần dùng các chốt dài hơn (longer pins) kết hợp với spacer hoặc standoff ngắn để gắn nhông vào Beam, nhằm tạo khoảng hở cho xích hoạt động.
Ưu điểm của cánh tay chain-bar là không có hai liên kết chạm vào nhau để giới hạn chiều cao nâng. Tuy nhiên, nếu xích bị tuột hoặc đứt mắt xích, cánh tay sẽ không hoạt động. Mô hình 3D Build này cung cấp cái nhìn chi tiết về cấu trúc của cánh tay chain-bar.
Double Reverse 4-Bar (Cánh tay 4-bar đảo chiều kép)
Cánh tay double reverse 4-bar là loại đòi hỏi nhiều tính toán và thời gian lắp ráp nhất. Chúng gần như luôn được lắp thành cặp để cân bằng lực tác động lên cánh tay. Việc lắp ráp bắt đầu từ một liên kết 4-bar. Liên kết ở đầu đóng vai trò là tháp thứ hai cho một bộ 4-bar phía trên.
Thông thường, một bánh răng lớn (large Gear) được gắn ở đầu xa của liên kết trên của bộ 4-bar dưới, và một bánh răng lớn khác được gắn ở đầu gần của liên kết dưới của bộ 4-bar trên. Khi cánh tay được nâng lên, hai bánh răng ăn khớp với nhau, khiến bộ 4-bar phía trên chuyển động theo hướng ngược lại với bộ phía dưới, giúp cánh tay vươn cao hơn. Mô hình 3D Build này cung cấp cái nhìn chi tiết về cấu trúc của cánh tay double reverse 4-bar.
Sơ đồ một cánh tay double reverse 4-bar. Hai bộ liên kết 4-bar được làm nổi bật, bộ phía trên được ký hiệu là 1 và bộ phía dưới là 2.
Khi thiết kế cánh tay double reverse 4-bar, điều quan trọng là phải tạo đủ khoảng hở để bộ 4-bar phía trên có thể đi vào bên trong hoặc ra bên ngoài bộ 4-bar phía dưới. Điều này có thể đạt được bằng cách:
Gắn bộ 4-bar phía trên vào phía trong của hệ bánh răng trung tâm.
Gắn bộ 4-bar phía dưới vào phía ngoài của hệ bánh răng.
Việc bổ sung càng nhiều thanh gia cường chéo càng tốt giữa cặp cánh tay sẽ giúp tăng độ ổn định cho hệ thống.
Nhiều thiết kế double reverse 4-bar gắn động cơ nâng (lift motor) với bánh răng 12T vào tháp thứ hai và dùng nó để truyền động cho các bánh răng lớn nâng cánh tay. Tuy nhiên, cánh tay cũng có thể được nâng bằng động cơ/hệ bánh răng đặt trên các tháp cố định gắn với chassis, hoặc kết hợp cả hai vị trí.
Double reverse 4-bar có thể đạt độ vươn cao nhất và chuyển động nâng tuyến tính nhất trong số các loại cánh tay đã thảo luận. Do khả năng đạt chiều cao rất lớn, cần đặc biệt cẩn thận khi điều khiển robot trong lúc cánh tay được vươn hết cỡ, nếu không robot có thể bị lật. Mô hình 3D Build bên dưới cung cấp cái nhìn chi tiết về cấu trúc của cánh tay double reverse 4-bar.
Sử dụng liên kết này để xem mô hình 3D của cánh tay Double Reverse 4-Bar chi tiết hơn.
Để biết thêm thông tin, hãy xem video thiết kế cánh tay (Arm Design Video) và phần tổng kết bài học (Lesson Summary) trong STEM Lab Up and Over.