Claw (kẹp) thường được gắn ở đầu cánh tay robot và dùng để nắm, giữ vật thể. Động cơ được sử dụng để kích hoạt chuyển động của claw. Động cơ thường đi kèm với hệ truyền động bằng tỉ số bánh răng hoặc hệ nhông – xích.
Claw một bên và claw hai bên thường sử dụng tỉ số truyền tăng mô-men xoắn, trong khi roller claw (claw dạng con lăn) thường sử dụng tỉ số truyền tăng tốc độ. Claw có thể được lắp ráp bằng nhiều loại Beam, Gear và các linh kiện khác trong hệ VEX IQ. Dây thun, Intake Flaps và/hoặc Traction Links có thể được dùng để tăng độ bám khi kẹp vật thể.
Nếu có đủ thời gian, nên chế tạo nhiều mẫu claw thử nghiệm trong giai đoạn thiết kế để đánh giá kiểu nào hiệu quả nhất trong việc thao tác vật thể thi đấu. Đôi khi, một thiết kế claw đơn giản lại mang tính cạnh tranh cao nhất.
Một số loại claw phổ biến được giải thích trong bài viết này. Lưu ý rằng các ví dụ lắp ráp 3D của những loại claw phổ biến này đều được cung cấp. Các mô hình có thể xoay, di chuyển và phóng to/thu nhỏ để quan sát từ nhiều góc độ khác nhau.
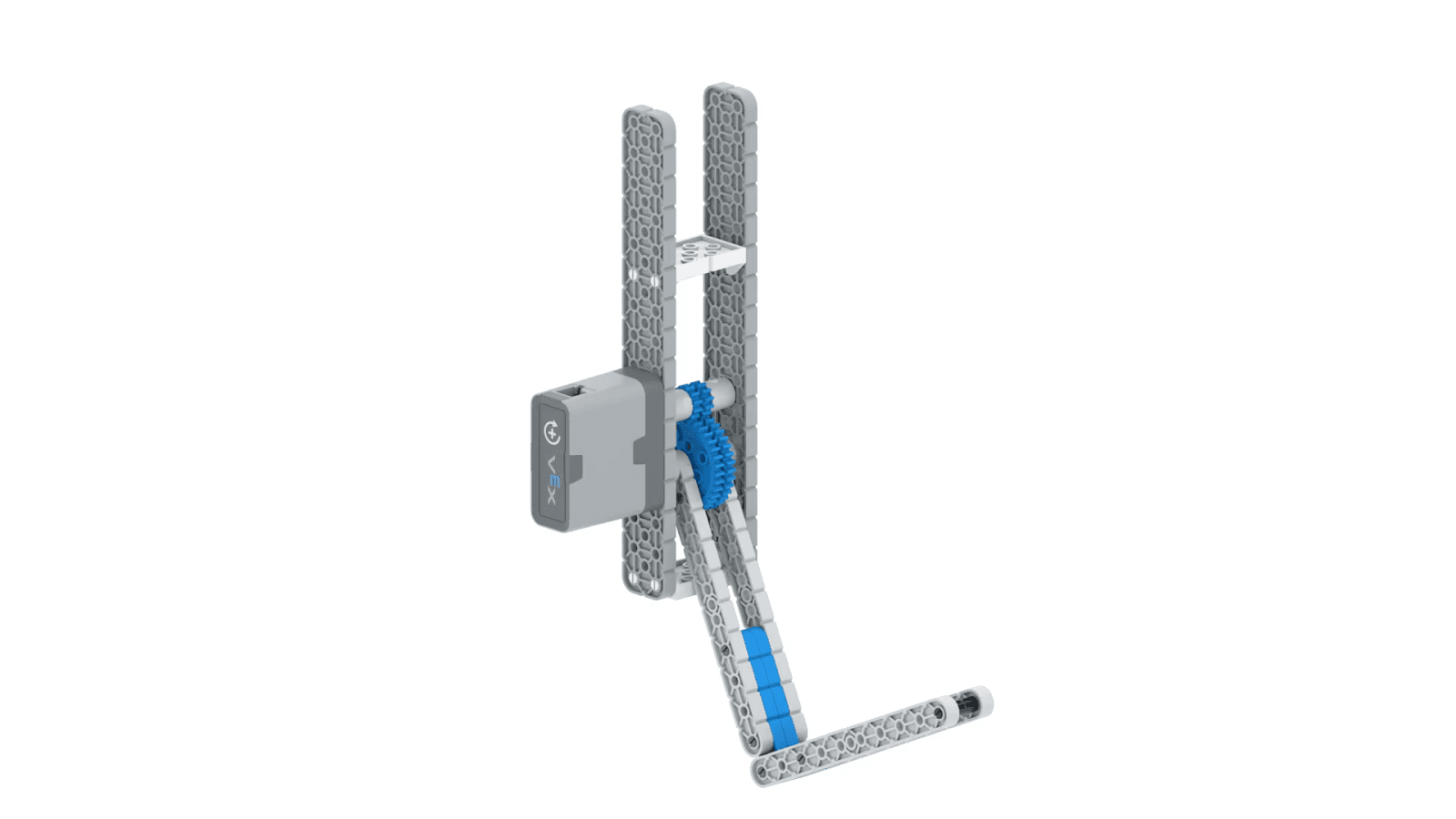
Claw một bên (Single-sided Claw)
Claw một bên, đôi khi còn được gọi là clamping claw, thường được lắp ráp với một beam cố định và một beam thứ hai được gắn với hệ động cơ/bánh răng.
Phần claw được động cơ điều khiển sẽ mở và đóng, kẹp vật thể thi đấu vào beam cố định.
Để hiểu cách hoạt động và cấu tạo của claw một bên, hãy tham khảo các tài nguyên bên dưới. Phần Animation minh họa nguyên lý hoạt động, trong khi 3D Build cho cái nhìn chi tiết về cấu trúc lắp ráp.
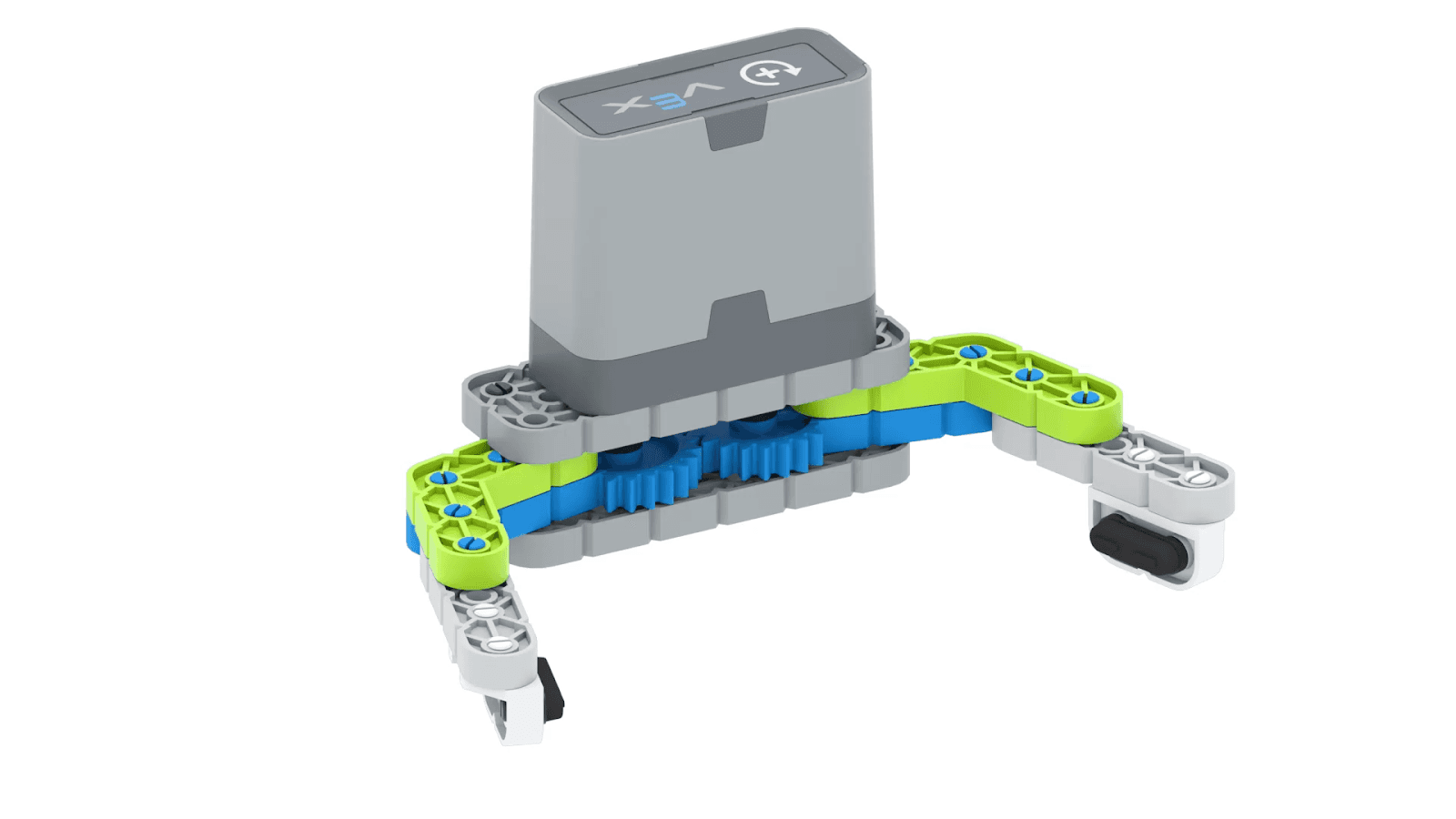
Claw hai bên (Double-sided Claw)
Claw hai bên (như trên Clawbot) sẽ kích hoạt cả hai phía của claw.
Các claw hai bên lắp ráp tùy chỉnh thường có số lượng bánh răng chẵn để điều khiển hai phía của claw.
Một bên claw được gắn với bánh răng đầu tiên trong hệ truyền động, và bên còn lại được gắn với bánh răng cuối cùng, cho phép claw mở và đóng khi các bánh răng quay.
Để hiểu cách hoạt động và cách lắp ráp claw hai bên, hãy tham khảo các tài nguyên bên dưới. Phần Animation minh họa nguyên lý hoạt động, trong khi các 3D Build cho thấy chi tiết cấu trúc.
Phiên bản claw hai bên này sử dụng traction links để tạo thành phần kẹp. Xem mô hình claw hai bên với traction links trong 3D Build bên dưới.
Phiên bản claw hai bên này sử dụng angle beams thay cho traction links để tạo phần kẹp. Xem mô hình claw hai bên với angle beams trong 3D Build bên dưới.
Phiên bản claw hai bên phức tạp hơn này sử dụng corner connectors kết hợp với beams để tạo phần kẹp, và slotted beams kết hợp với angle beams để tạo phần kẹp phía sau claw. Xem mô hình claw hai bên phức tạp này trong 3D Build bên dưới.
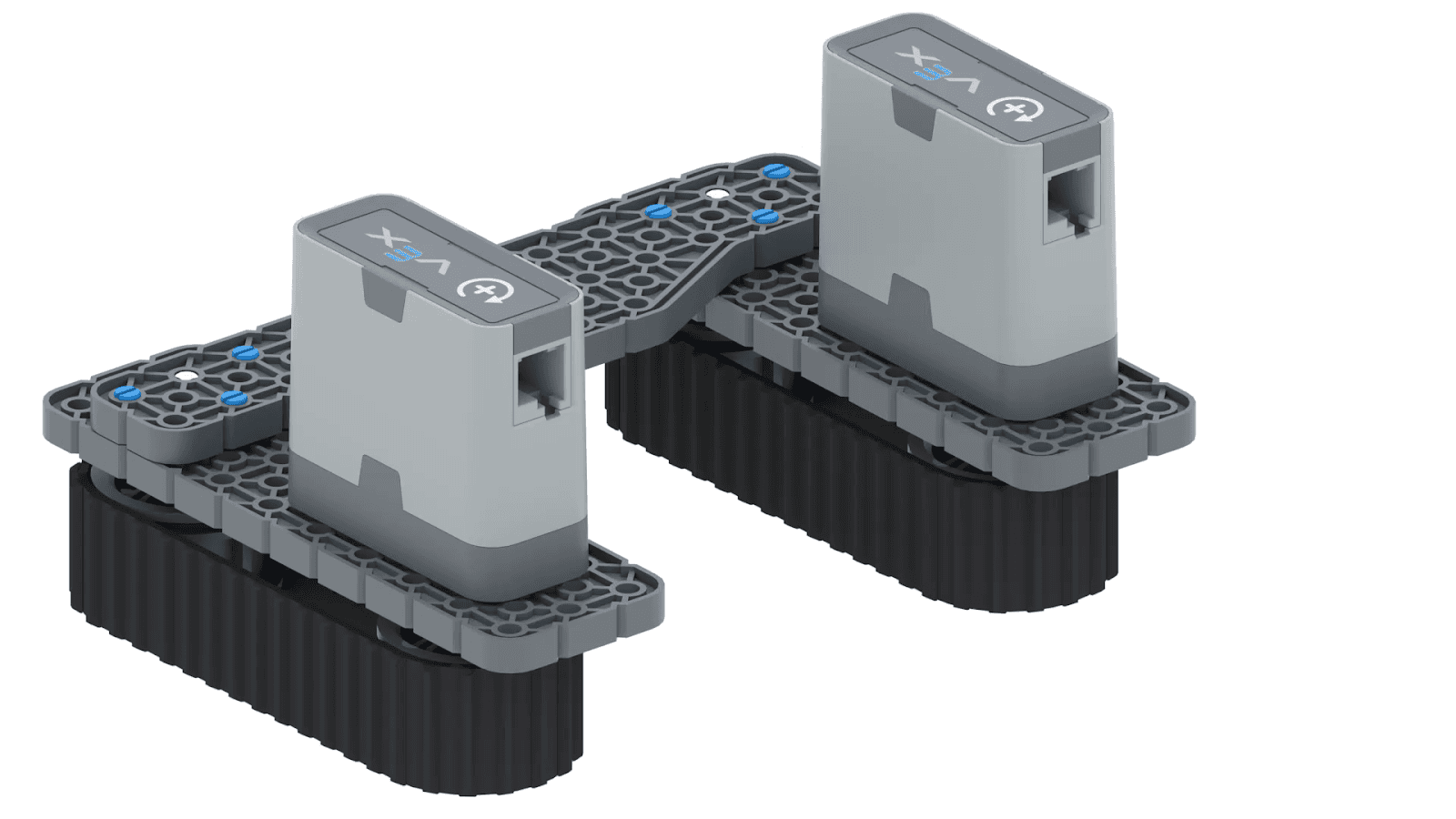
Roller Claw (Claw dạng con lăn)
Roller claw thường được lắp ráp bằng Wheels, Intake Belts hoặc Tank Treads. Roller claw hoạt động bằng cách quay các con lăn để kéo vật thể thi đấu vào bên trong claw. Sau đó, con lăn có thể quay ngược lại để đẩy vật thể ra ngoài.
Roller claw có thể được lắp với một bên là beam cố định đóng vai trò như một mặt ma sát, và bên còn lại là con lăn chủ động để cuốn vật thể dọc theo mặt cố định.
Roller claw cũng có thể được lắp với con lăn ở cả hai bên.
Thông thường, roller claw được thiết kế quay nhanh hơn tốc độ robot di chuyển về phía trước.
Roller claw cho phép nhặt vật thể với ít thời gian căn chỉnh robot hơn, tuy nhiên chúng đòi hỏi nhiều thời gian và kế hoạch hơn để lắp ráp.
Để hiểu cách hoạt động và cách xây dựng roller claw, hãy tham khảo các tài nguyên bên dưới. Phần Animation minh họa nguyên lý hoạt động, trong khi 3D Build cung cấp cái nhìn chi tiết về cấu trúc lắp ráp.