


Hướng dẫn đi dây (Wiring Guide)
Tại sao đi dây lại quan trọng?
Bạn đã bao giờ nhìn vào trong robot và thấy một mớ dây như màng nhện? Việc đi dây (wiring) là cực kỳ quan trọng trong FTC®, nhưng thường bị bỏ qua hoặc làm gấp vào giờ chót trước khi thi đấu. Tuy nhiên, việc bỏ thời gian để đi dây đúng cách rất quan trọng cho hiệu suất và khả năng bảo trì của robot.
Chú ý: Rất không nên để đội xem nhẹ phần đi dây – nhiều đội mới thường bỏ qua nó hoặc ít chú ý khi thiết kế.
Mặc dù việc đi dây có thể hơi tẻ nhạt và không hấp dẫn, nhưng nó có thể là yếu tố quyết định thắng – thua. Robot tốt nhất trên thế giới cũng sẽ không hoạt động nếu một dây bị lỏng hoặc bị rối trong lúc trận đấu. Vì vậy, việc đi dây cần được suy nghĩ cẩn thận ngay từ bước thiết kế và xây dựng robot.
Hướng dẫn chung (General Advice)
Luôn dán nhãn dây! Khi các dây tụ lại, bạn có thể không biết dây nào cắm vào cổng nào.
Buộc các dây lỏng lại, tốt hơn là buộc cả bó dây vào một bộ phận kết cấu. Điều này giúp đảm bảo dây không can thiệp vào các cơ cấu chuyển động.
Chú ý số cổng! Hub (ví dụ REV hub) thường có nhiều cổng mỗi loại.
Xem mọi điểm nối dây như là điểm có thể hỏng. Vì vậy, hãy dùng băng cách điện để cách điện các kết nối và sử dụng “strain relief” (cơ chế giảm lực kéo) càng nhiều càng tốt.
Nên dùng strain relief ở mọi chỗ có thể. Ví dụ: dùng bộ giữ USB (USB Retention Mount), hoặc in 3D các chi tiết giữ dây cho Expansion Hub, điện thoại điều khiển, v.v.
Không nên hàn dây trước khi ép cos (crimping). Khi hàn, thiếc có thể “lan” (creep) và làm mất kết nối, thậm chí gây cháy.
Giữ chiều dài dây càng ngắn càng tốt để giảm rối và dễ quản lý.
Khi dùng dây tín hiệu / cảm biến, hãy để chúng tránh xa động cơ để giảm nhiễu điện từ (EMI). Nếu có thể, thêm bead chống nhiễu (ferrite bead).
Nối cos (crimp) thường tốt hơn hàn, vì mối hàn có thể bị gãy dễ hơn.
Giữ các dây nằm gọn, tránh vùng chuyển động, đảm bảo không có cơ cấu nào “hớt” hoặc kéo dây khi chuyển động.
Với dây cấp điện, dây có tiết diện lớn (số AWG nhỏ hơn) được ưu tiên hơn vì điện trở thấp và lưu thông dòng tốt hơn. (Chú ý: điều này không quan trọng với dây dữ liệu).
Dây nhỏ và mảnh rất dễ hỏng – không đặt chúng nơi dễ bị va chạm. Dây nguồn lớn có thể chịu lực tốt hơn.
Đảm bảo dây không bị kẹp (pinch) giữa các cơ cấu chuyển động, đặc biệt ở các khớp, cánh tay, v.v.
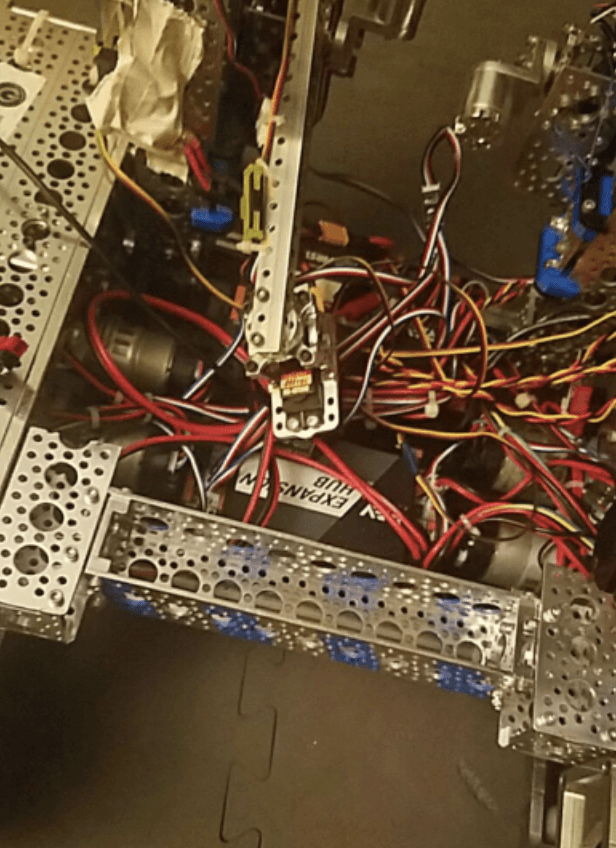
Một ví dụ về cách nối dây tệ
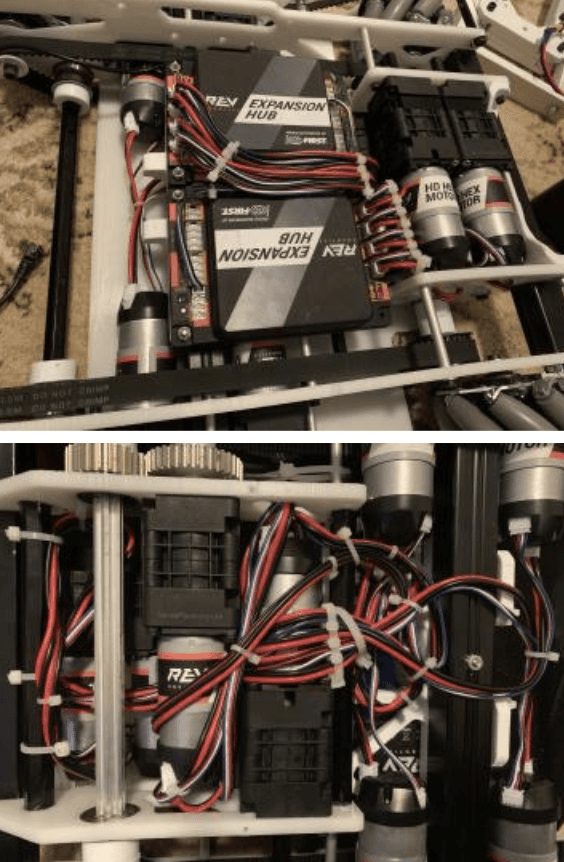
Ví dụ tốt (731 Wannabee Strange, Rover Ruckus)
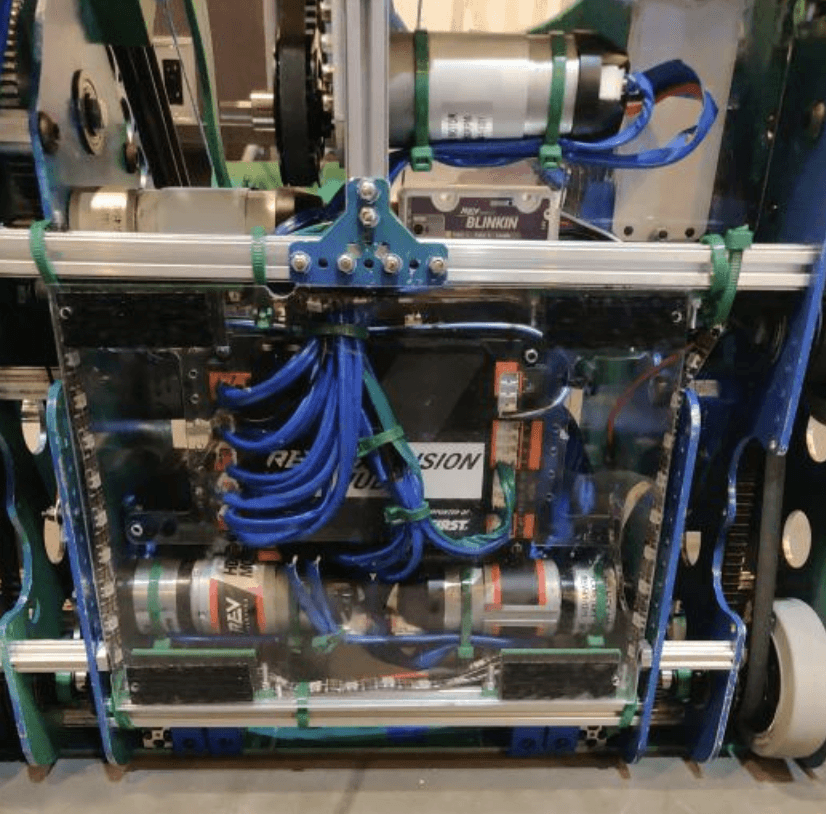
Ví dụ tốt (8417 ‘Lectric Legends)
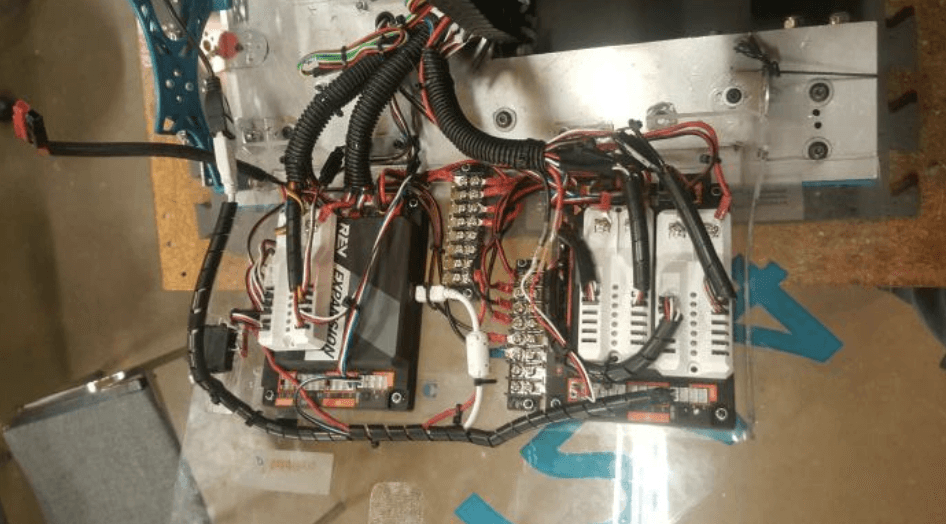
Ví dụ tốt (7244 Out of the Box Robotics)
Khuyến nghị cụ thể (Specific Recommendations)
Nguồn module (Module Power)
Cổng XT30 có thể bị mài mòn nhanh hơn so với PowerPole. Ngoài ra, vì XT30 thường được hàn, chúng dễ bị hỏng hơn so với các kết nối PowerPole.
Dây cho module nguồn nên dùng ít nhất 14 AWG, nếu được thì 12 AWG. Dây nên là loại bện (stranded), không phải loại lõi rắn.
Nguồn động cơ (Motor Power)
Dây cấp động cơ nên dùng trong khoảng từ 16 AWG đến 12 AWG (bện, không rắn).
Một số động cơ (ví dụ REV HD Hex, Core Hex) có đầu nối tháo rời; một số khác (ví dụ Andymark NeveRest) có dây hàn cố định. Nếu có thể, nên dùng đầu nối phía sau hoặc dây cắm ngắn để dễ tháo lắp.
Dây servo
Nên dùng dây nối mở rộng (extension) chất lượng cao.
Dùng băng cách điện ở các điểm nối giữa dây mở rộng và dây servo vì các kết nối này dễ lỏng ra theo thời gian.
Ví dụ: bộ điều khiển motor VEX Motor Controller 29 có đầu nối 3 chân sai loại — bạn cần dùng cáp chuyển đổi hoặc thêm đầu nối phù hợp. Bảo vệ MC29 vì nó dễ hỏng nếu bị va chạm.
USB
USB là đầu nối khá bền, nhưng dễ bị hao mòn theo thời gian. Vì vậy, hạn chế việc cắm/rút nhiều lần, đặc biệt trên điện thoại RC/DS.
USB nên được strain relief. Để giảm rủi ro bị ngắt, buộc dây sao cho không có nhiều phần lỏng trong robot.
Dây cảm biến / encoder
Dây và đầu nối cảm biến rất dễ hỏng. Khi đi dây, hãy cẩn trọng và để dư dây (slack) gần đầu nối để dễ cho strain relief.
Các đầu nối dữ liệu JST trên REV Expansion Hub / Control Hub có +5V, GND và hai chân dữ liệu. Nếu bạn dùng cảm biến kỹ thuật số hoặc analog không dùng I²C, bạn có thể dùng cáp Y để chia tín hiệu một cổng ra hai cảm biến.
Các phần khác (Miscellaneous)
Dây tiếp đất REV (REV Grounding Strap): đây là cách duy nhất được phép để nối đất cho robot. Gắn một đầu vào khung kim loại của robot, đầu kia cắm vào một cổng XT30 trống trên robot.
Khối phân phối nguồn (Power Distribution Blocks / Panels): Ví dụ: REV Power Distribution Block cho phép các đội sử dụng hơn bốn cổng XT30 (2 cổng mỗi Expansion Hub). Khối này có thể kết hợp với Servo Power Module để tăng điện áp cho servo.
Giấy lau quần áo (Dryer sheets): có thể dùng để lau robot sau mỗi trận đấu để giảm tích điện tĩnh. Không phải là khuyến nghị chính thức từ FIRST hay nhà sản xuất, nhưng qua thực nghiệm nhiều đội thấy nó giúp hoặc ít nhất không gây hại. Tuy nhiên, việc sử dụng dryer sheet có thể nằm trong vùng “ranh giới hợp lệ” vì nối đất robot là không được phép.
Xịt chống tĩnh (Staticide / static spray): dùng để giữ cho robot không bị tích điện. Nên xịt trước khi sự kiện, không trong lúc thi đấu.
Nguyên nhân phổ biến gây tích điện tĩnh:
Mọi điểm tiếp xúc của robot với sàn sẽ làm tăng mức tích điện tĩnh.
Quá nhiều lực ma sát (scrub) khi bánh xe cố gắng quay – đặc biệt nếu robot dùng 4WD hoặc 6WD không có “center drop”.
Một bộ phận dẫn điện chạm đất. Ví dụ, intake chạm đất khi robot đang di chuyển — điều này nên tránh.