Tank (Skid-Steer) Drivetrains — Hệ thống truyền động Tank (Skid-Steer)
2 Wheel Drive (Pushbot Drive)
Chỉ khuyến nghị dùng cho hệ truyền động đầu tiên, không dùng để thi đấu
Hệ truyền động cho người mới này được xem là một trong những hệ truyền động kém hiệu quả nhất, dù vẫn có thể dùng ở mức độ thi đấu thấp. Đây là kiểu truyền động nhập môn cho nhiều đội rookie vì nó được quảng bá trong các hướng dẫn chính thức của FIRST® (từ đó có tên gọi “pushbot”). Nó thường có bánh traction (traction wheels) được dẫn động trực tiếp kết hợp với bánh omni không được cấp lực.
Loại truyền động này có khả năng quay kém vì tâm quay nằm ở phía sau robot, giữa hai bánh được cấp lực. So với các truyền động khác, nó có gia tốc thấp do chỉ sử dụng hai motor.
Mặc dù không phải là hệ truyền động tối ưu, nó vẫn có thể thi đấu được nếu đảm bảo độ tin cậy. Theo kinh nghiệm chung, mọi đội mới đều nên xây pushbot trước hết để học cách lắp ráp bằng bộ kit. Pushbot là điểm khởi đầu tốt vì giúp đội làm quen với việc dùng linh kiện kit, gắn bánh xe, lắp motor,… Tuy nhiên, trong môi trường thi đấu, nó yếu hơn mọi hệ truyền động khác.
Attention – Chú ý
Dù pushbot là hệ truyền động đầu tiên tốt cho đội mới làm quen với bộ kit, khuyến nghị các đội không dùng hệ này cho robot thi đấu.
Advantages – Ưu điểm
Hệ truyền động đơn giản nhất để lắp
Không cần phải cấp lực cho cả bốn bánh
Disadvantages – Nhược điểm
Chậm hơn các lựa chọn khác
Thiếu lực (các hệ truyền động khác thường dùng 4 motor)
Sử dụng motor Tetrix MAX, dễ cháy, yếu, hộp số fragility
Kém linh hoạt vì quay bằng 2 motor
Gia tốc kém vì chỉ 2 motor
Thường dẫn động trực tiếp (direct-driven), điều rất không nên cho drivetrains
Hình: Tetrix pushbot Ví dụ hệ pushbot có trong hướng dẫn FTC® cơ bản
4 Wheel Drive — Hệ truyền động 4 bánh
Ở dạng phổ biến nhất, hệ truyền động này dùng bố trí bánh giống như hệ 2 bánh (2 bánh traction ở sau, 2 bánh omni ở trước), nhưng có điểm khác quan trọng: cả bốn bánh đều được cấp lực.
Một số đội dùng cả 4 bánh traction hoặc cả 4 bánh omni. Không khuyến nghị dùng cả 4 traction vì khả năng quay rất kém, do wheel scrub.
Wheel scrub – Ma sát cạnh bánh
Là ma sát giữa cạnh bánh và mặt sàn. Nó cản trở việc quay vì truyền động phải vượt qua lực ma sát này để quay robot. Wheel scrub phổ biến ở hệ 4 hoặc 6 bánh không có “drop center”.
Dùng omni cho cả 4 bánh sẽ cho khả năng quay “xuất sắc”, giúp robot quay quanh tâm. Tuy nhiên, robot sẽ mất nhiều lực kéo (traction). Vì thế, nhiều đội chọn dùng 2 bánh traction + 2 bánh omni để cân bằng giữa độ bám và khả năng quay nhanh. Ưu điểm chính của hệ 4 bánh là có thể vượt địa hình nếu chassis được nâng cao phù hợp.
Khuyến nghị hệ truyền động 4 bánh nên có hình vuông hoặc gần vuông để tránh khó khăn khi quay.
Note – Lưu ý
Phân bố khối lượng (weight distribution) là yếu tố lớn cần cân nhắc: càng nhiều trọng lượng phía sau thì càng tốt.
Weight distribution – Phân bố trọng lượng
Chỉ cách trọng lượng robot được phân chia. Lý tưởng nhất là 50–50 (50% trước – 50% sau) để đạt khả năng quay và điều khiển tối ưu.
Hiện tượng off-center turning (quay không tâm) gần như luôn xuất hiện trong hệ 4 bánh. Điều này không phải lúc nào cũng gây vấn đề, nhưng cần lưu ý. Off-center turning có thể là lợi thế, nhưng tốc độ quay sẽ chậm hơn 6WD hoặc 8WD.
Advantages – Ưu điểm
Linh hoạt hơn 2WD
Gia tốc và traction tốt
Vượt địa hình nếu chassis đủ cao
Lực đẩy tốt để phòng thủ, nhưng vẫn đủ linh hoạt để né
Disadvantages – Nhược điểm
Dễ lật hơn 6WD/8WD nếu trọng tâm cao
4 traction wheels → quay kém
Phân bố trọng lượng ảnh hưởng mạnh đến bán kính quay
6 Wheel Drive (6WD) — Hệ truyền động 6 bánh
Rất phổ biến trong FTC vì: traction tuyệt vời, quay tốt, ổn định, nhiều điểm tiếp xúc với mặt đất → bám đường tốt. Có 2 dạng:
Corner omni (omni ở bốn góc)
Drop center
Drop Center – Hạ bánh trung tâm
Drop center 6WD là hệ mà bánh giữa được gắn thấp hơn 1/16" – 1/4". Khuyến nghị khoảng 1/8".
Robot nhẹ (< 25 lbs): drop ít hơn
Robot nặng (> 25 lbs): drop > 1/8" sẽ quay tốt hơn
Mục đích: đảm bảo chỉ có 4 bánh chạm đất tại một thời điểm → giảm ma sát quay khi 6 bánh cùng chạm đất. Nhu cầu drop có thể thay đổi theo điều kiện mặt sân và trọng lượng robot.
Hầu hết hệ drop center là custom vì khó làm bằng kit (trừ REV). goBILDA và Actobotics có thể làm bằng pillow block nhưng hơi bất tiện. goBILDA hiện đã ra drop-center bearing plate nên việc làm drop center dễ hơn.
Corner Omni 6WD
Không cần drop center. Giảm vấn đề ma sát khi quay bằng cách thay bánh góc bằng omni. Quay tốt, traction hơi giảm.
Kết hợp drop center + corner omni = quay mượt nhất, nhưng có hiệu ứng phụ như lắc và giảm traction.
Advantages – Ưu điểm
Traction + linh hoạt tuyệt vời
Gia tốc tốt, có thể có tốc độ cao
Ổn định ở mọi trọng lượng robot
Dễ phòng thủ
Disadvantages – Nhược điểm
Drop center khó làm bằng hệ channel (đã dễ hơn nhờ plate mới)
Drop center quay hơi kém hơn corner omni
Phụ thuộc điều kiện mặt sân
Corner omni traction kém hơn
Gear ratio chậm sẽ khiến 6WD ì hơn
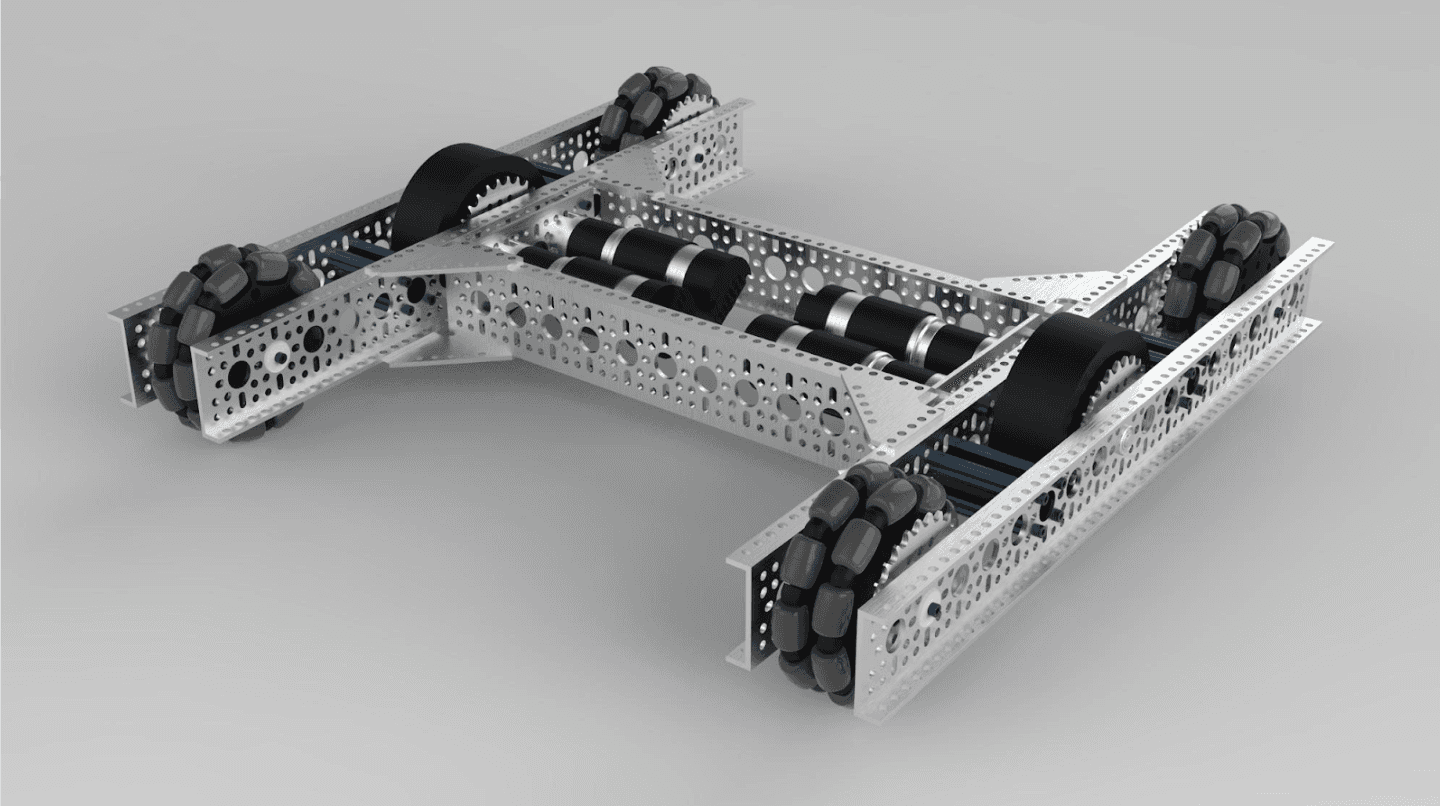
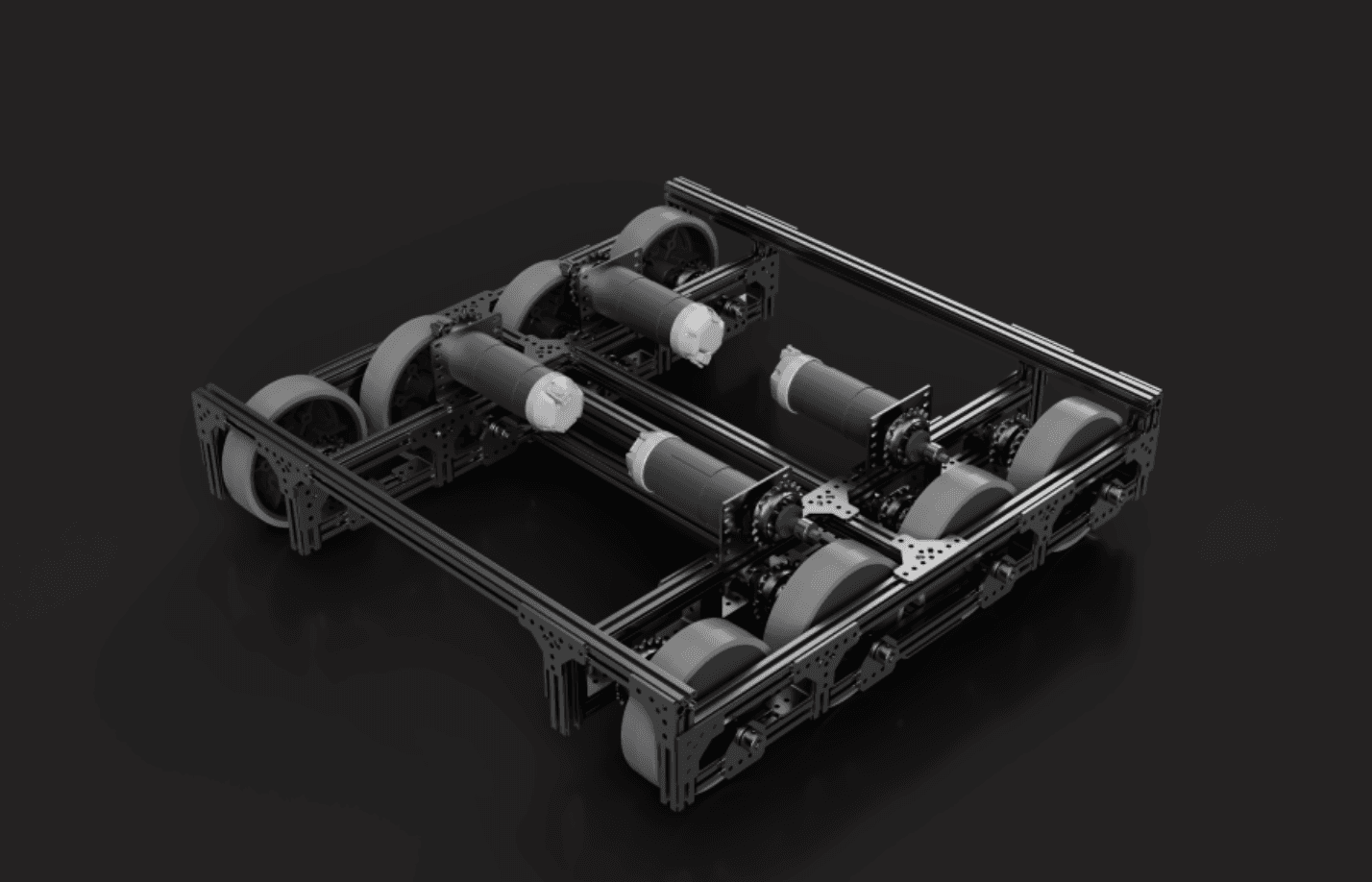
8 Wheel Drive — Hệ truyền động 8 bánh
Ít phổ biến hơn 6WD, kết hợp đặc điểm của 4WD và 6WD.
Ở 8WD, 4 bánh giữa được drop, nên khi quay chỉ 4 bánh giữa chạm đất.
→ Ổn định hơn 6WD khi quay
→ Nhưng 6WD quay nhanh hơn
Do có bánh ở cùng vị trí như 4WD → ổn định tốt.
Khuyến nghị: cả 8 bánh đều được cấp lực, dùng motor planetary tốt hơn spur gear motor.
Có thể dùng double omni ở bốn bánh ngoài → tăng khả năng quay, giảm traction/pushing power.
Advantages – Ưu điểm
Kết hợp ổn định 6WD + linh hoạt 4WD
Ổn định hơn 6WD
Traction + gia tốc rất mạnh
Tuyệt vời để phòng thủ
Disadvantages – Nhược điểm
Tốn nhiều không gian hơn 6WD
Cấp lực cho 8 bánh phức tạp hơn
Nếu drop không đủ, rất khó quay
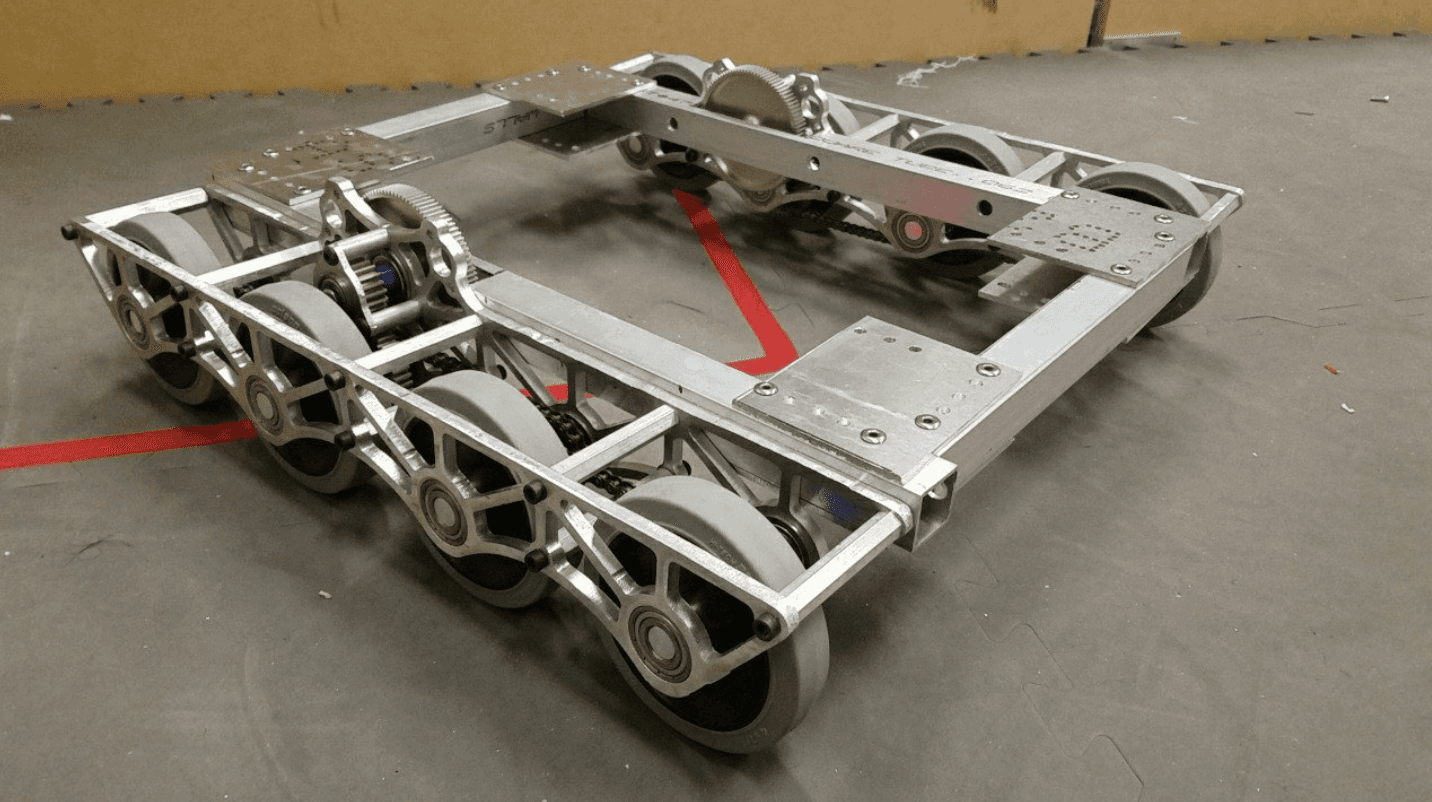
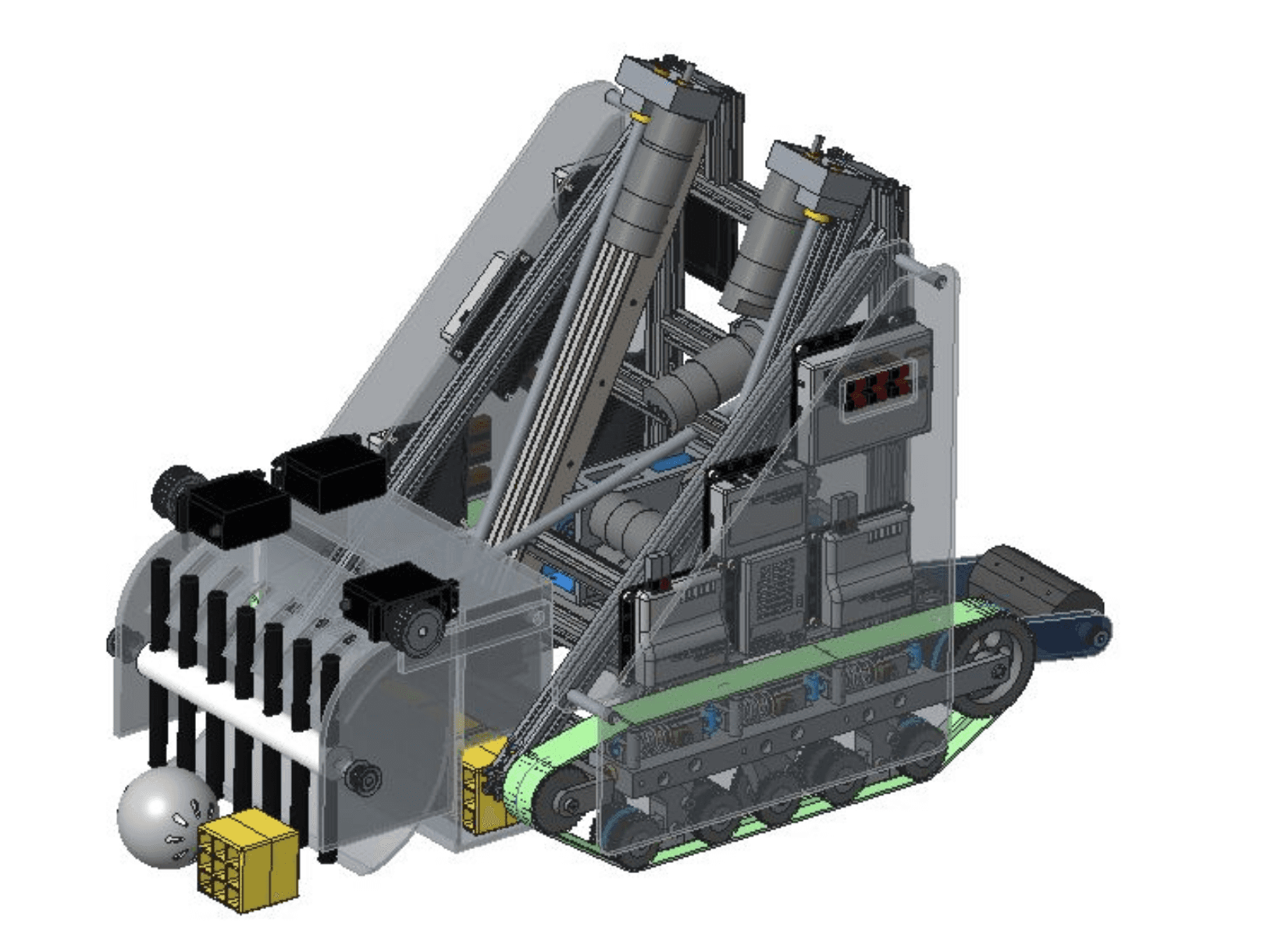
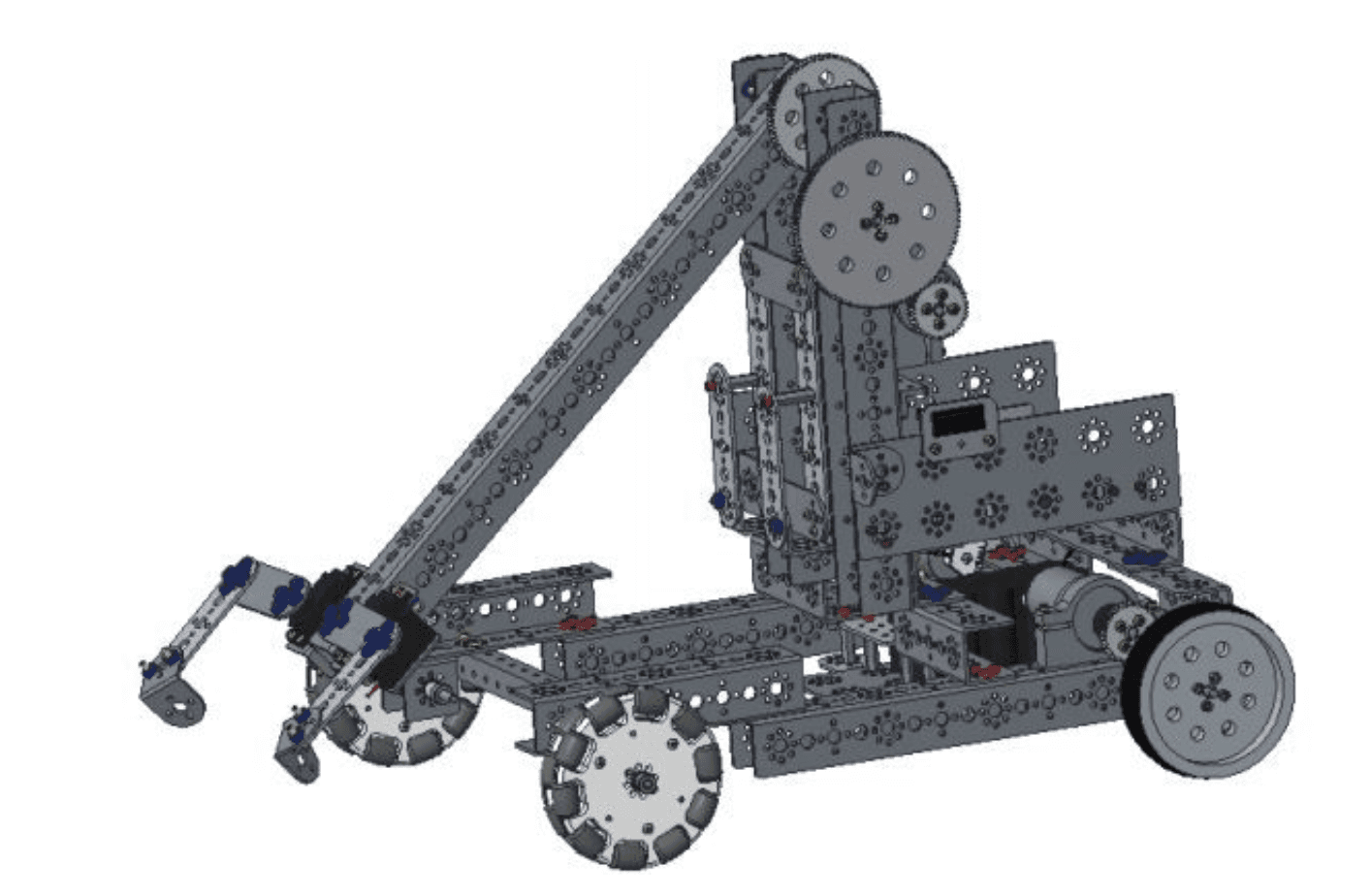
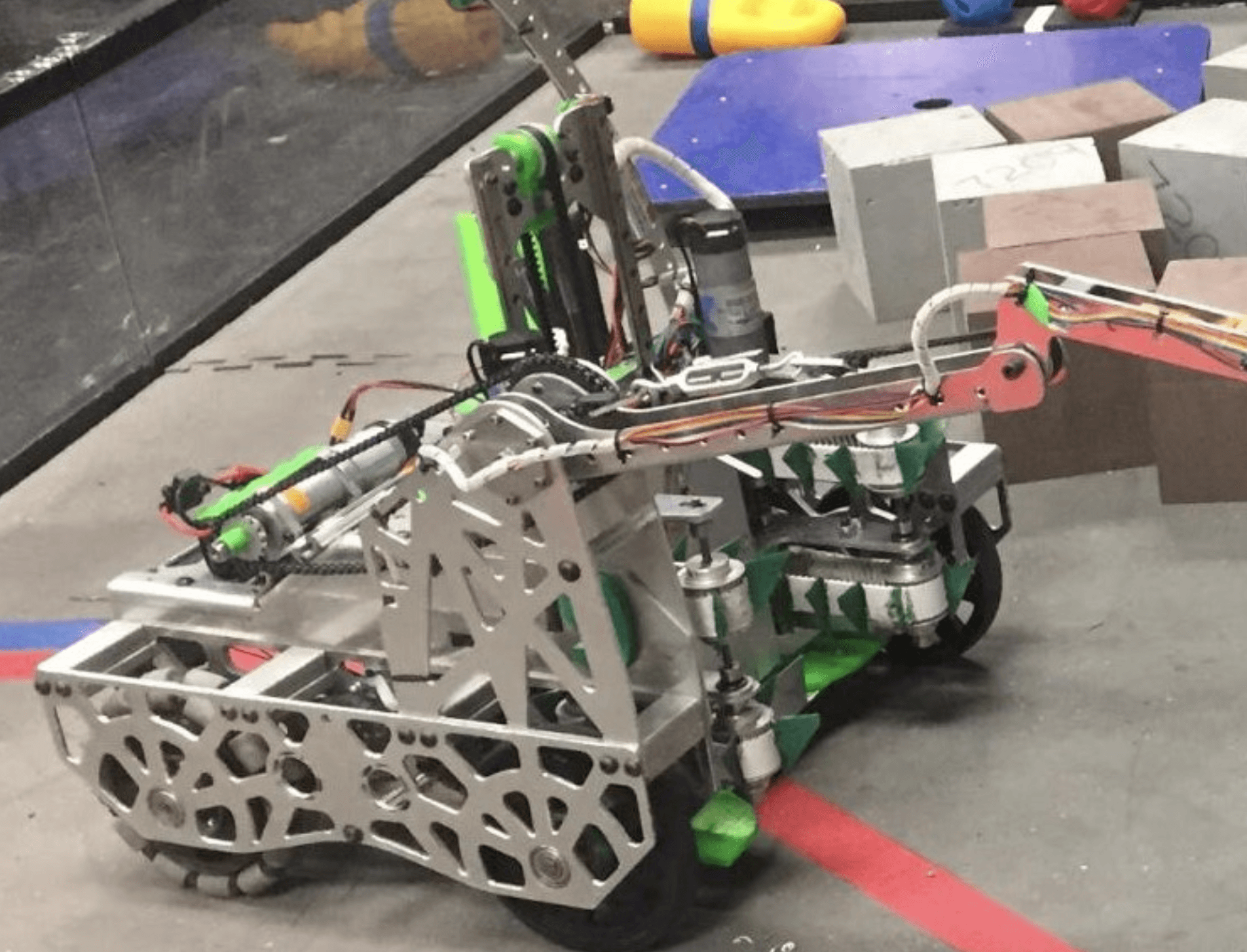
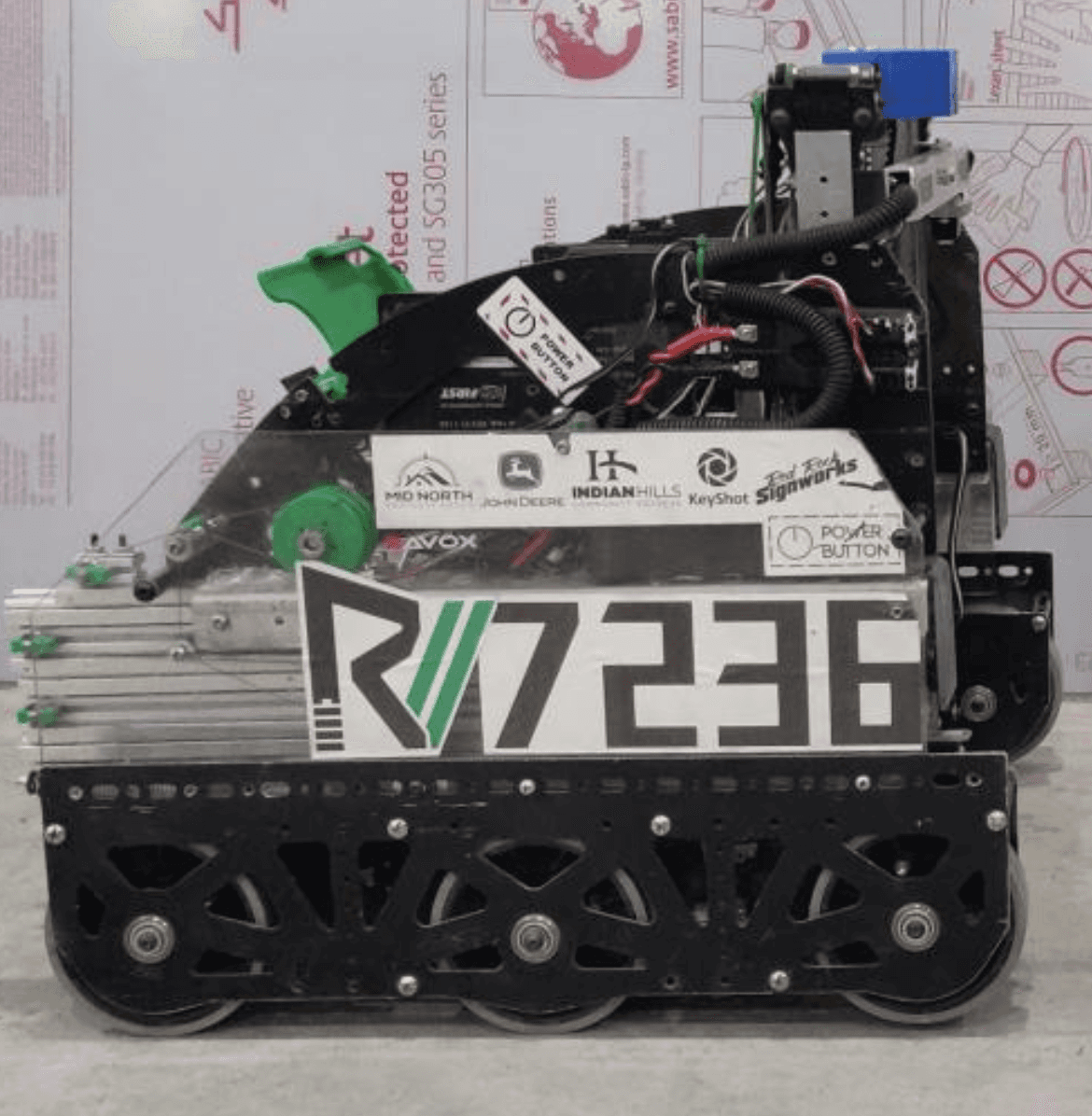
Tread Drive — Truyền động bánh xích
Tread = dùng xích hoặc dây bản rộng như xe tăng.
Không hiệu quả trong FTC vì:
Phức tạp, nhiều điểm dễ hỏng
Rất dễ bị đối thủ “chặn”, va nhẹ cũng lệch xích
TETRIX track dễ gãy và trật, không phù hợp thi đấu
Dù có thể làm tread drive tốt (ví dụ bên dưới), đội thiếu kinh nghiệm thường không đủ kỹ năng.
Tread drive tăng traction rất ít nhưng giảm mạnh khả năng điều khiển. Có nhiều lựa chọn vượt địa hình tốt hơn → như 4WD.
Advantages – Ưu điểm
Rất tốt khi vượt địa hình
Traction và pushing power mạnh
Disadvantages – Nhược điểm
Kém linh hoạt và tốc độ tối đa thấp
Rất phức tạp
Tread dễ hỏng, dễ rơi