

Khi người dùng mới bắt đầu lắp ráp các thiết kế robot tùy chỉnh của riêng mình, đến một thời điểm nào đó họ có thể muốn nhiều hơn từ các VEX IQ Smart Motors. Các VEX IQ Smart Motors có thể được xem là sở hữu hiệu năng và khả năng cảm biến tốt nhất trong số các hệ thống robot dạng lắp ráp nhanh (snap-together robotic system) hiện nay. Tuy nhiên, người dùng vẫn có thể muốn động cơ di chuyển nhanh hơn, nâng được vật nặng hơn, hoặc truyền chuyển động đến các cơ cấu ở xa động cơ. Các Bánh răng (Gears), Nhông (Sprockets) và Puly (Pulleys) của VEX IQ cho phép đáp ứng những yêu cầu này.
Tỷ lệ đầu ra / đầu vào
Khi thảo luận về Bánh răng / Nhông / Puly nhựa VEX (VEX Plastic Gears / Sprockets / Pulleys), có một số thuật ngữ tiêu chuẩn thường được sử dụng:
Driving / Input (Dẫn động / Đầu vào)
Là bánh răng / nhông / puly được gắn trên trục (shaft) mà Smart Motor đang cưỡng bức quay.
Driven / Output (Bị dẫn / Đầu ra)
Là bánh răng / nhông / puly được gắn trên trục của một bộ phận (ví dụ: bánh xe hoặc tay nâng) và sẽ quay do chuyển động từ đầu vào.
Tốc độ quay (Rotational Speed)
Là tốc độ quay của một trục, thường được đo bằng số vòng quay trong một phút, còn gọi là vòng/phút (revolutions per minute – rpm).
Mô-men xoắn (Torque)
Là lực cần thiết để quay một tải tại một khoảng cách.
Ví dụ: cần nhiều mô-men xoắn hơn để quay một cánh tay dài hơn hoặc khi cánh tay chịu tải nặng hơn. Tương tự, cần nhiều mô-men xoắn hơn để quay bánh xe có đường kính lớn hoặc khi bánh xe đang di chuyển một vật nặng.
Mô-men xoắn thường được đo bằng đơn vị newton–mét (Nm) — đơn vị kết hợp giữa lực và khoảng cách.
Hai nguyên lý quan trọng khi sử dụng Gears, Sprockets và Pulleys:
Tăng mô-men xoắn
Khi bánh răng / nhông / puly đầu vào (input component) có đường kính nhỏ hơn so với bộ phận đầu ra, mô-men xoắn đầu ra của hệ thống sẽ tăng lên. Tuy nhiên, tốc độ quay đầu ra sẽ giảm tương ứng.
Nói cách khác, nếu động cơ không thể nâng được một cánh tay, thì động cơ cần dùng một bộ phận nhỏ hơn để dẫn động một bộ phận lớn hơn trên trục của cánh tay đó.
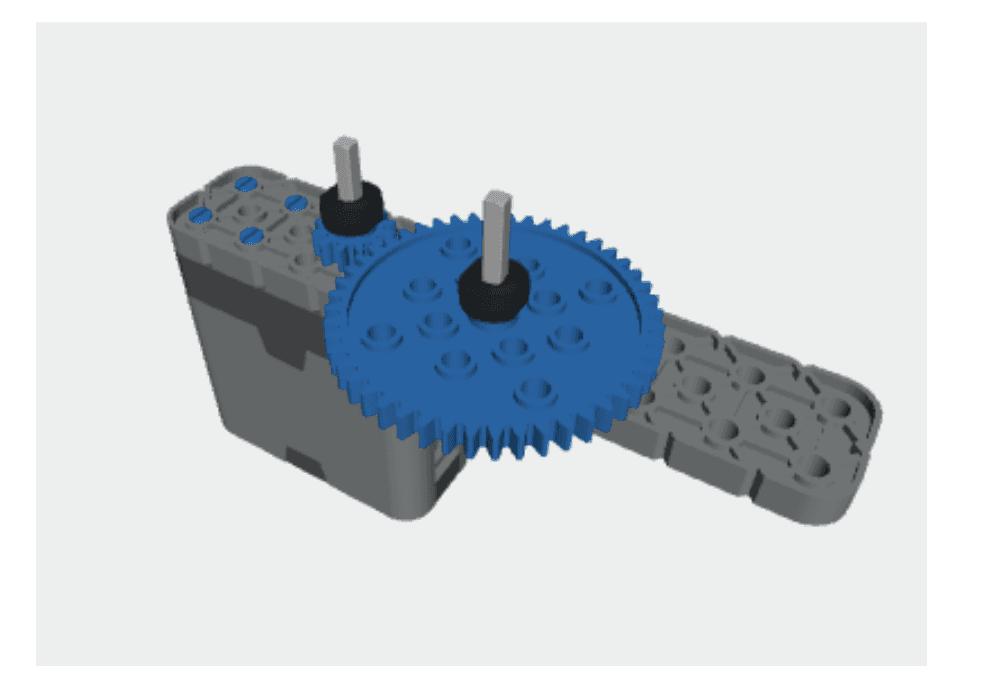
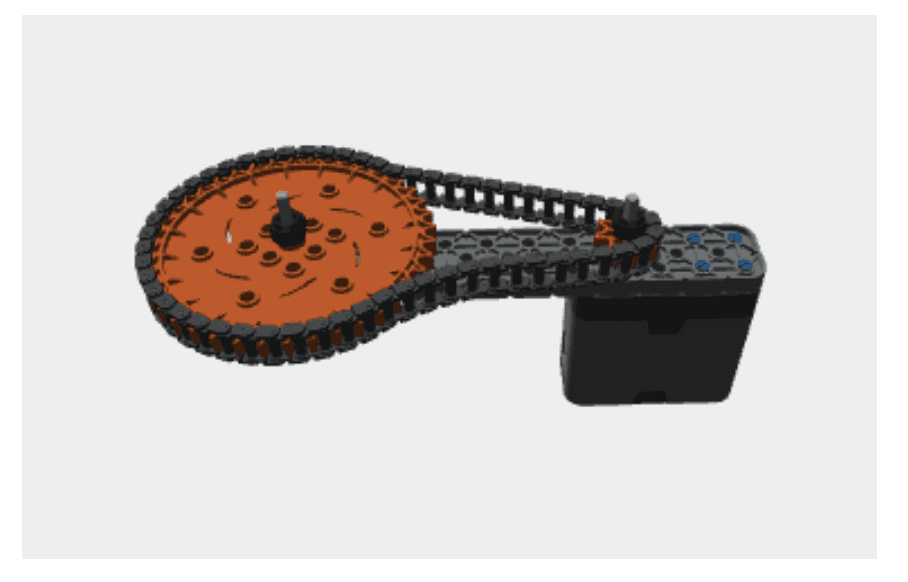
Xem các 3D Builds sau để minh họa việc tăng mô-men xoắn của Smart Motor bằng bánh răng, nhông và puly:
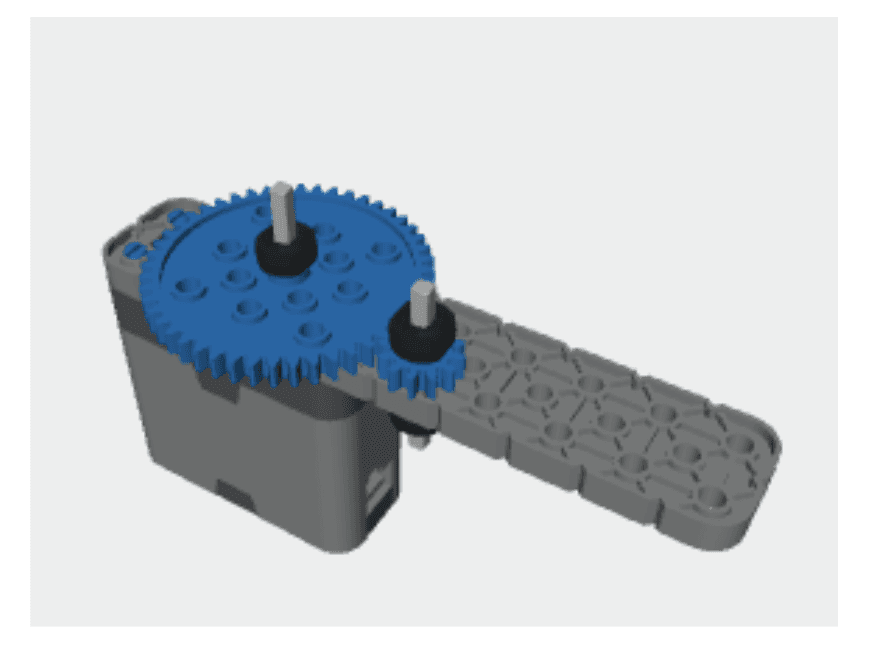
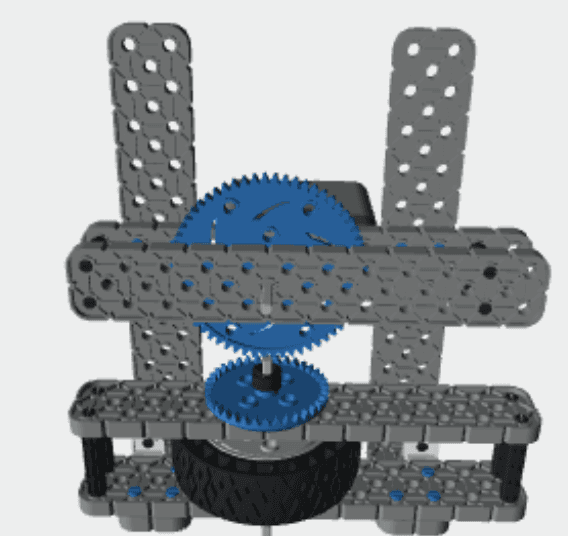
Gear Increase Torque
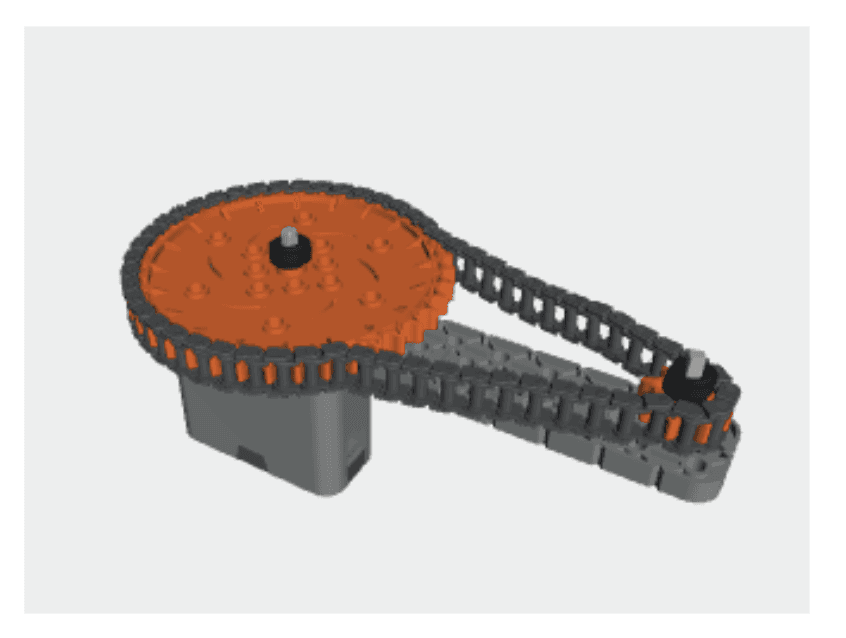
Sprocket Increase Torque
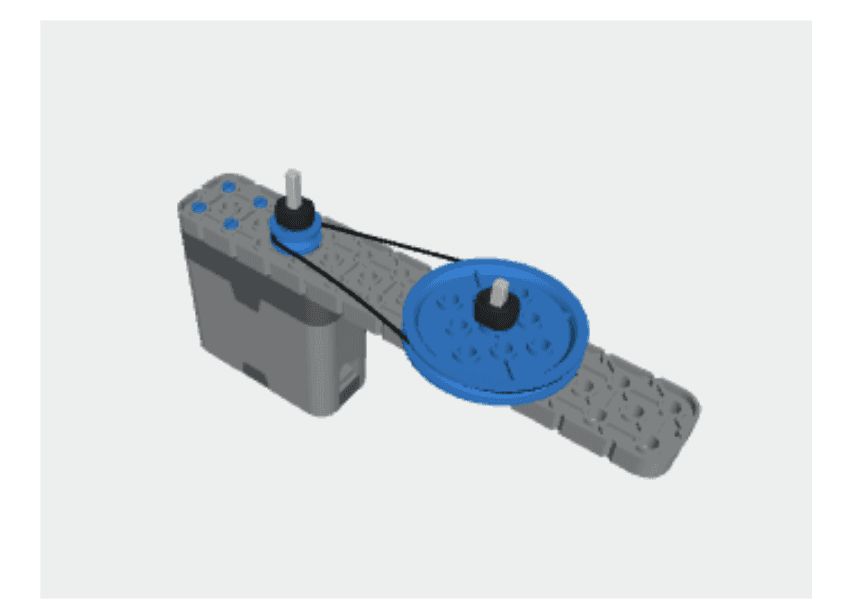
Pulley Increase Torque
Tăng tốc độ
Khi bộ phận đầu vào có đường kính lớn hơn bộ phận đầu ra, tốc độ quay đầu ra của hệ thống sẽ tăng lên. Tuy nhiên, mô-men xoắn đầu ra sẽ giảm tương ứng.
Ví dụ, nếu người dùng muốn bánh xe quay nhanh hơn tốc độ quay của động cơ, thì động cơ cần dùng một bộ phận lớn hơn để dẫn động một bộ phận nhỏ hơn trên trục bánh xe.
Xem các 3D Builds sau để minh họa việc tăng tốc độ của Smart Motor:
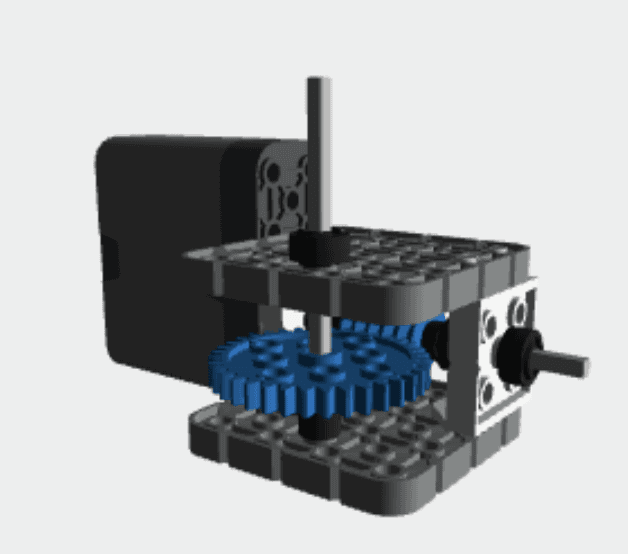
Gear Increase Speed
Sprocket Increase Speed
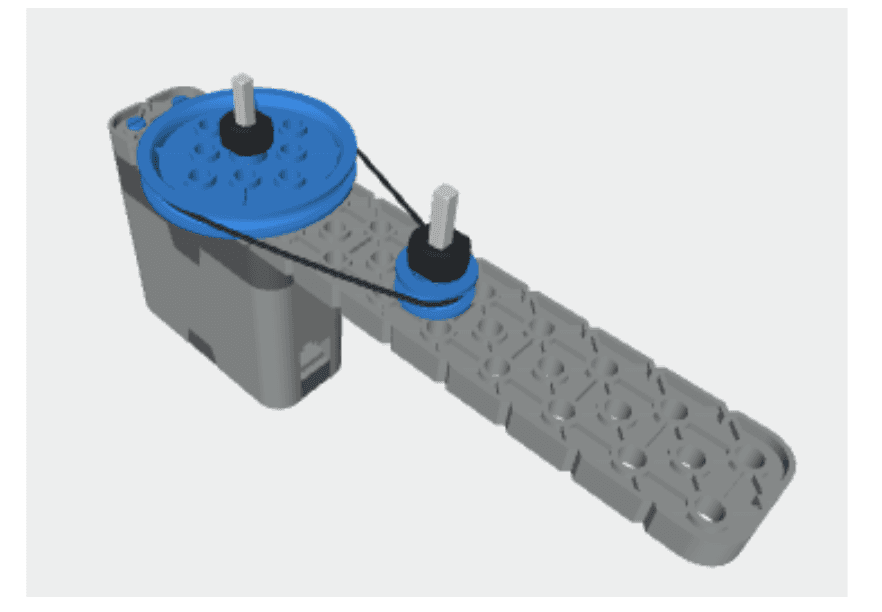
Pulley Increase Speed
Mức độ của các mối quan hệ trên có thể được tính bằng tỷ lệ đầu ra / đầu vào, cụ thể:
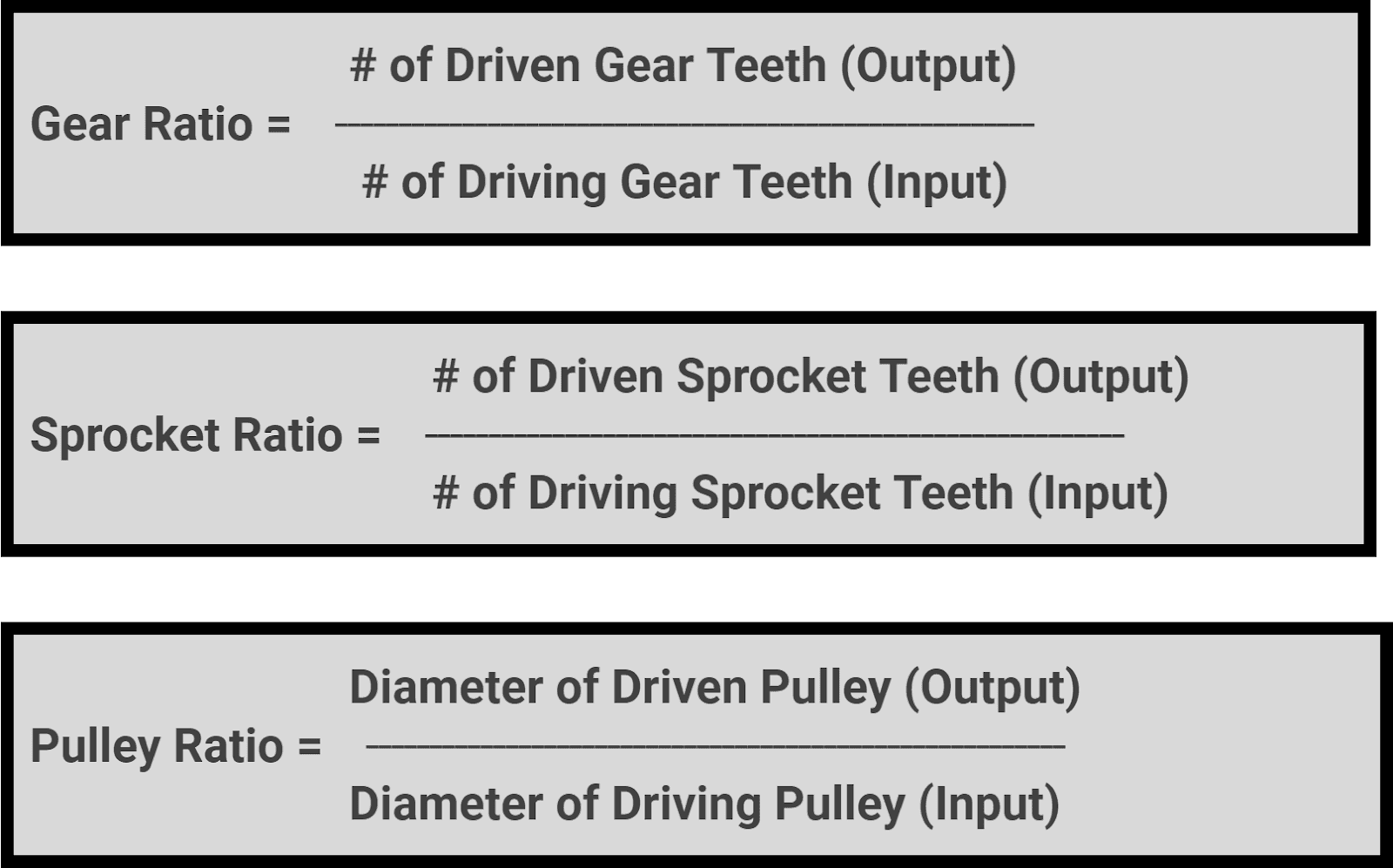
Số răng bánh răng đầu ra / số răng bánh răng đầu vào → tỷ lệ mô-men xoắn của bánh răng (gear ratio)
Số răng nhông đầu ra / số răng nhông đầu vào → tỷ lệ mô-men xoắn của nhông (sprocket ratio)
Đường kính puly đầu ra / đường kính puly đầu vào → tỷ lệ mô-men xoắn của puly (pulley ratio)
Tỷ lệ bánh răng nhựa VEX (60 răng, 36 răng, 12 răng)
Bánh răng đầu ra | Bánh răng đầu vào | Tỉ số truyền | Đầu ra với động cơ 100 RPM | Đầu ra với động cơ 0,4 Nm |
60 răng | 12 răng | 5 : 1 | 20 vòng/phút | 2,0 Nm |
36 răng | 12 răng | 3 : 1 | 33 vòng/phút | 1,2 Nm |
60 răng | 36 răng | 5 : 3 | 60 vòng/phút | 0,67 Nm |
36 răng | 60 răng | 3 : 5 | 167 vòng/phút | 0,24 Nm |
12 răng | 36 răng | 1 : 3 | 300 vòng/phút | 0,13 Nm |
12 răng | 60 răng | 1 : 5 | 500 vòng/phút | 0,08 Nm |
Từ bảng tỷ lệ bánh răng nhựa VEX ở trên, có thể thấy rằng các tỷ lệ truyền có thể thay đổi đáng kể tốc độ quay đầu ra và mô-men xoắn đầu ra của Smart Motor.
Cần lưu ý rằng khi sử dụng tỷ lệ đầu ra / đầu vào, các phép tính này không tính đến ma sát và các yếu tố khác trong hệ thống robot.
Ví dụ, có thể bạn sẽ muốn thiết kế tỷ lệ bánh răng 1:5 cho hệ truyền động (drivetrain) để robot di chuyển rất nhanh (500 rpm). Tuy nhiên, có nhiều yếu tố khiến điều này không thực tế:
Trước hết, bánh răng 60 răng lớn hơn bánh xe 200mm Travel Wheel, khiến bánh răng nâng bánh xe khỏi mặt đất.
Ngoài ra, mô-men xoắn đầu ra sẽ rất nhỏ (0.08 Nm), khiến Smart Motor có thể không đủ lực để quay bánh xe hoặc di chuyển robot.
Ngay cả khi có thể sử dụng tỷ lệ này, robot di chuyển nhanh gấp năm lần tốc độ bình thường sẽ rất khó điều khiển.
Ví dụ này cho thấy rằng khi sử dụng tỷ lệ đầu ra / đầu vào, mục tiêu là tìm ra một điểm cân bằng tối ưu (“sweet spot”) giữa mô-men xoắn và tốc độ. Đồng thời, cũng cần đảm bảo rằng các linh kiện có thể lắp vừa trong thiết kế robot.
Truyền công suất
Bánh răng, nhông và puly nhựa VEX cũng có thể được sử dụng để truyền công suất. Điều này cần thiết khi thiết kế không cho phép Smart Motor dẫn động trực tiếp trục của bánh xe hoặc bộ phận khác.
Trong trường hợp này, bộ phận đầu vào và đầu ra có cùng kích thước, do đó không có sự thay đổi về mô-men xoắn hay tốc độ quay. Cách bố trí này thường được gọi là tỷ lệ 1:1.
Một số ví dụ:
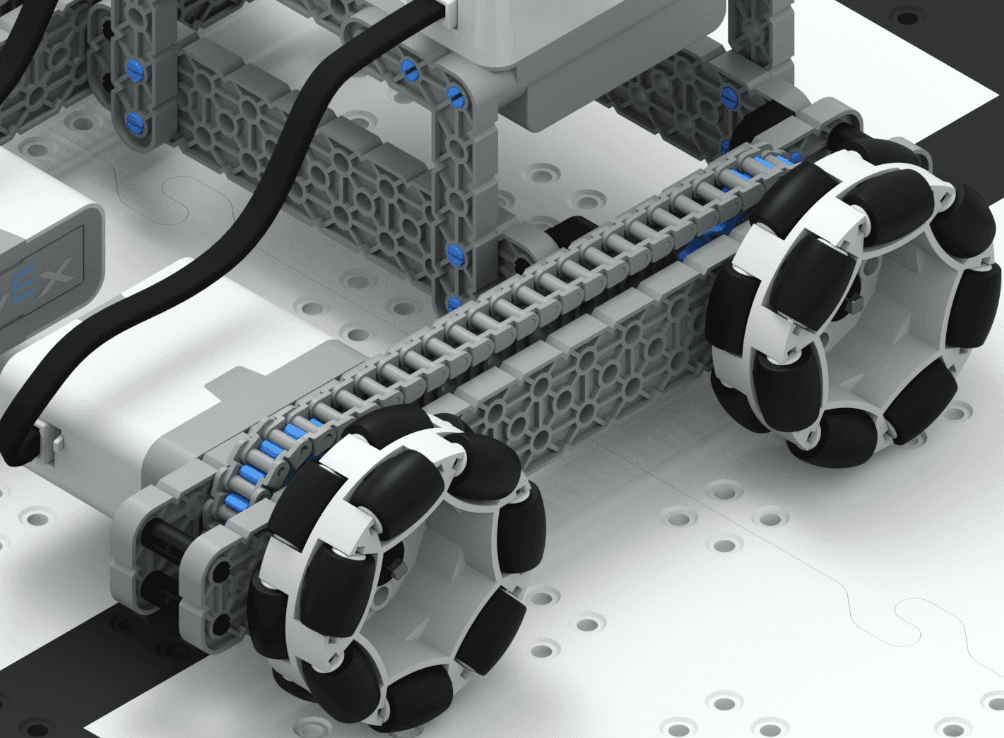
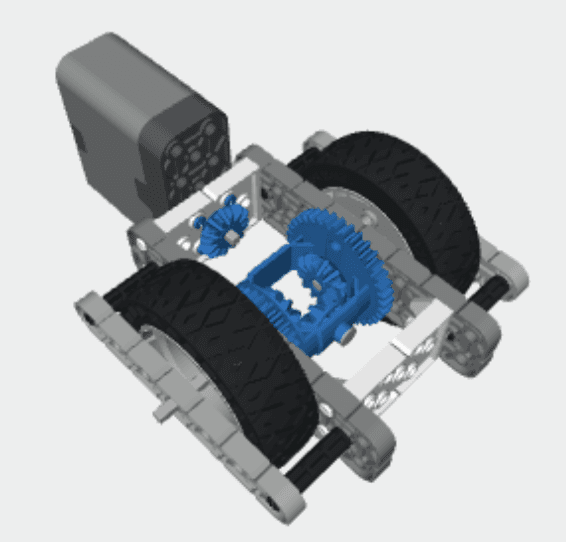
Một hệ truyền động có thể dẫn động một bánh xe trực tiếp bằng Smart Motor và truyền công suất sang bánh còn lại bằng nhông và xích với tỷ lệ 1:1.
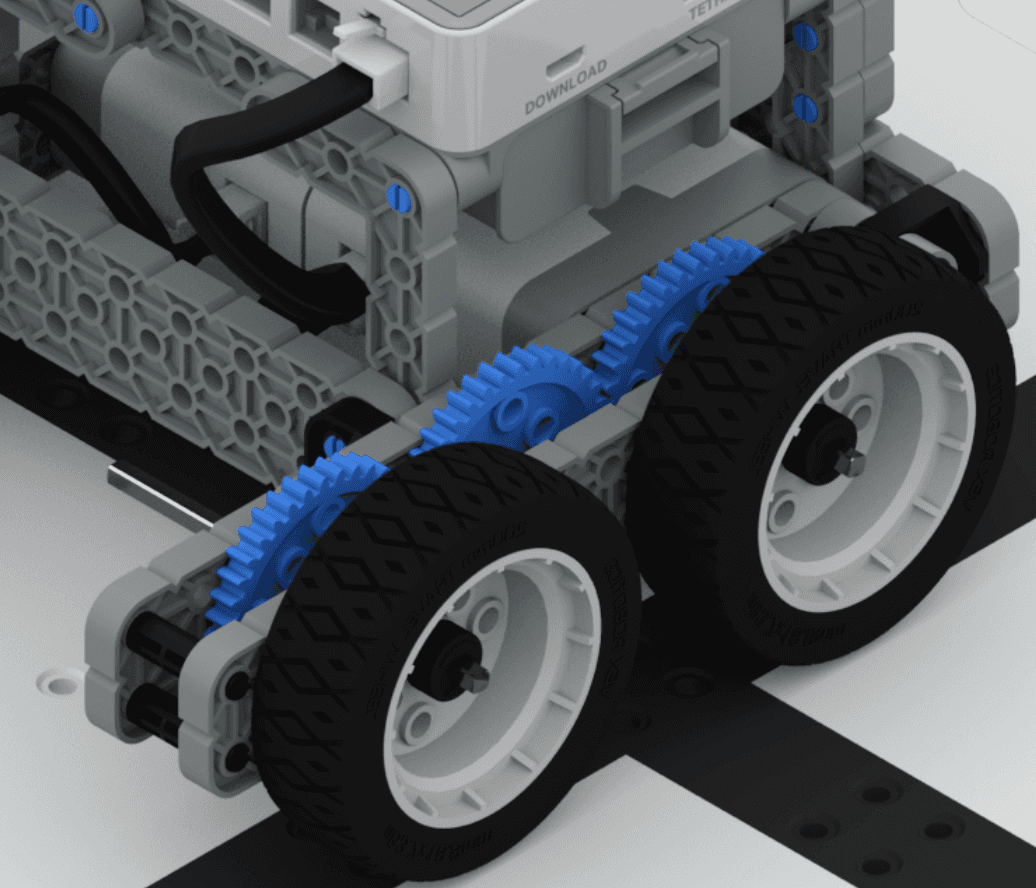
Một hệ truyền động có thể có 3 bánh răng (hoặc bất kỳ số lẻ nào) được xếp nối tiếp; một bánh xe gắn vào bánh răng đầu tiên và một bánh xe gắn vào bánh răng cuối cùng. Nếu tất cả bánh răng có cùng kích thước, động cơ có thể dẫn động bất kỳ bánh răng nào.
Lưu ý quan trọng:
Khi sử dụng bánh răng trong hệ truyền động, cần có số lượng bánh răng lẻ giữa hai bánh xe. Nguyên nhân là vì khi một bánh răng dẫn động bánh răng khác, chúng quay ngược chiều nhau.Nếu có số bánh răng chẵn, hai bánh xe sẽ quay ngược hướng với nhau, như minh họa trong video.
Link video: https://content.vexrobotics.com/kb/videos/iq/IQ_Gear_Rotation.mp4
Truyền công suất bằng nhông
Truyền công suất bằng bánh răng
Lựa chọn linh kiện: Bánh răng, Nhông hay Puly
Có nhiều yếu tố quyết định nên sử dụng bánh răng, nhông hay puly trong thiết kế robot. Một số yếu tố bao gồm:
Bánh răng (Gears)
Bánh răng là lựa chọn đáng tin cậy nhất trong ba loại linh kiện. Trừ khi khoảng cách giữa các gối đỡ trục quá lớn khiến trục bị uốn cong đủ để làm các răng bánh răng tách khỏi nhau, thì khi bánh răng đầu vào quay, bánh răng đầu ra chắc chắn sẽ quay.
Tuy nhiên, bánh răng cũng có một số nhược điểm:
Bánh răng phải được bố trí ở khoảng cách cố định để các răng có thể ăn khớp (intermesh).
Bánh răng cần được căn thẳng hàng với nhau. (Ngoại lệ: khi kết hợp bánh răng “Primary” 12/36/50 răng với bánh răng “Secondary” 24/48 răng. Các bánh răng secondary cần được lệch nửa pitch hoặc sử dụng lỗ giữa bổ sung trên beam 1x có chiều dài chẵn).
Như đã đề cập, số bánh răng lẻ sẽ khiến bánh răng đầu vào và đầu ra quay cùng chiều, còn số bánh răng chẵn sẽ khiến chúng quay ngược chiều.
Lưu ý đặc biệt:
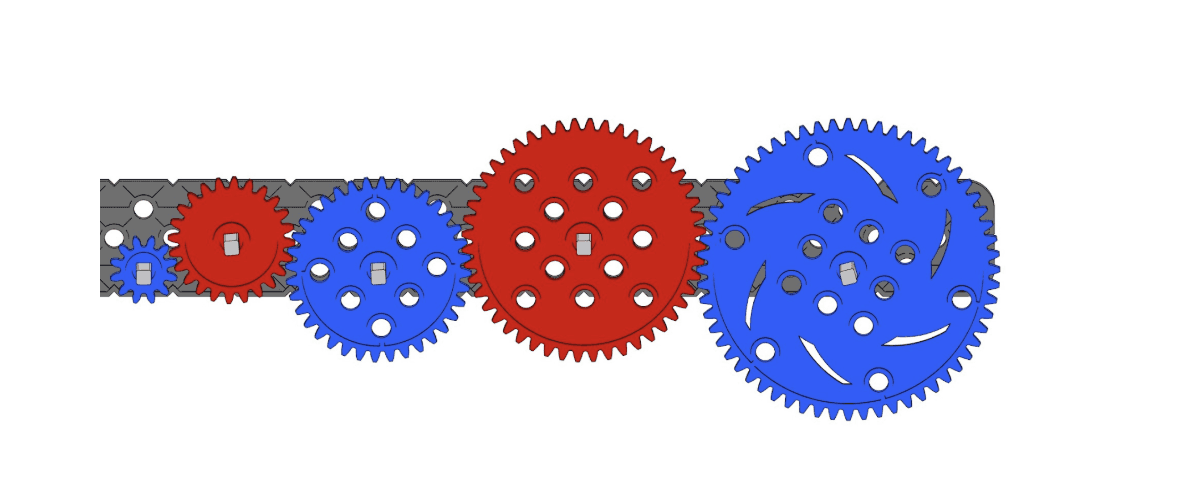
Khi sử dụng tỷ lệ bánh răng, chỉ cần xét kích thước bánh răng đầu vào và bánh răng đầu ra cuối cùng. Các bánh răng ở giữa chỉ có nhiệm vụ truyền chuyển động, kích thước của chúng không ảnh hưởng đến tỷ lệ truyền.
Crown Gears
Differential & Bevel Gears
Worm Gears
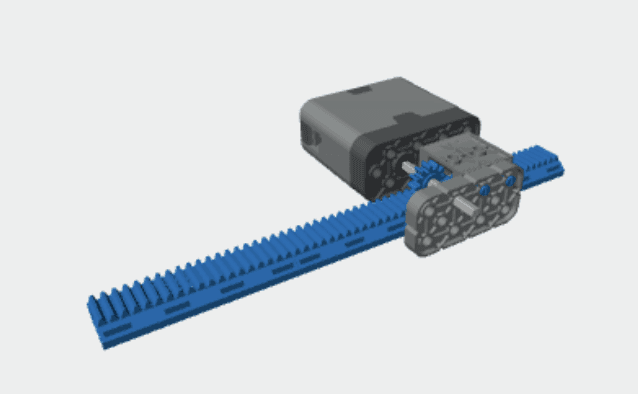
Rack Gears
Nhông (Sprockets)
Nhông cũng là một lựa chọn tốt. Trục của chúng có thể được đặt cách nhau ở nhiều khoảng pitch khác nhau, vì xích (chain) được lắp từ các mắt rời (snap-together links) và có thể tạo thành độ dài tùy chỉnh. Nhông dẫn động nên có ít nhất 120° xích quấn quanh, nếu không xích có thể trượt răng trên nhông. Nhông cũng có thể được nối với nhau bằng Tank Tread. Nhông đầu vào và nhông đầu ra luôn quay cùng chiều, như minh họa trong hình động.
Link video minh họa: https://content.vexrobotics.com/kb/videos/iq/IQ_Sprocket_Rotation.mp4
Puly (Pulleys)
Puly được thiết kế cho tải nhẹ. Khoảng cách giữa các trục bị giới hạn bởi chiều dài các dây đai cao su (Rubber Belts) có sẵn (30mm, 40mm, 50mm, 60mm) Các dây đai cao su của hệ puly có bề mặt trơn. Dây đai sẽ trượt nếu tải mà hệ thống cố di chuyển quá lớn. Tương tự như nhông, puly đầu vào và puly đầu ra thường quay cùng chiều. Tuy nhiên, như minh họa trong hình động, nếu dây đai được bắt chéo hình chữ X, chúng sẽ quay ngược chiều.
(Lưu ý: dây đai cao su có thể được bắt chéo để đảo chiều quay của puly đầu ra.)
Link video minh họa: https://content.vexrobotics.com/kb/videos/iq/IQ_Pully_Rotation.mp4
Dù thiết kế robot sử dụng bánh răng, nhông hay puly, đều có rất nhiều lựa chọn để thay đổi tỷ lệ đầu ra / đầu vào hoặc truyền công suất cho VEX IQ Smart Motors.