


Lưu ý quan trọng: Phần triển khai này còn lỗi (buggy) và sẽ được thay thế trong phiên bản FTCLib tiếp theo. Hiện tại không khuyến nghị sử dụng (not recommended).
Pure Pursuit
Thuật toán Pure Pursuit trong FTCLib được phát triển nhằm giúp người dùng chỉ cần thêm các waypoint (điểm đường) mong muốn và gọi phương thức followPath() trong lớp Path.
Để sử dụng, bạn cần truyền vào:
mecanum drivetrain (hệ truyền động mecanum)
odometry (hệ thống định vị) của robot
Khi phương thức hoàn tất, nó sẽ trả về true hoặc false tùy theo việc thực thi có thành công hay không.
Ngoài ra, bạn có thể sử dụng phương thức loop() và trực tiếp truyền các vị trí odometry vào đó. Hãy đảm bảo bạn cập nhật odometry sau mỗi vòng lặp (iteration).
What is Pure Pursuit? (Pure Pursuit là gì?)
Pure Pursuit, còn được gọi tắt là “PP”, là một thuật toán theo dõi đường đi (path tracking algorithm) dùng để tính toán vận tốc robot nhằm đi tới một điểm nhìn trước (look-ahead point) từ vị trí hiện tại.
Thuật toán này theo đường đi một cách tương đối (loosely), dựa trên một tập hợp các waypoints – tức các tọa độ trên sân đấu.
Cách hoạt động của bộ điều khiển pure pursuit:
Tạo một vòng tròn với bán kính xác định
“Nhìn trước” dọc theo đường đi để tìm điểm giao (intersection) giữa vòng tròn và đường
So sánh hướng robot (heading) với bán kính nối từ tâm robot đến điểm giao đó
Robot di chuyển tương ứng để tiến tới điểm giao
Bán kính này có thể tùy chỉnh riêng cho từng waypoint để tăng độ chính xác
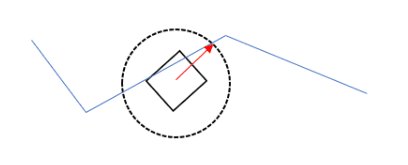
Minh họa trực quan cho cơ chế look-ahead
Robot liên tục theo dõi điểm giao này theo thời gian thực.
Đó chính là cách robot “theo” đường đã chỉ định.
Về bản chất, thuật toán này hoạt động như một bộ điều khiển P (P controller – bộ điều khiển tỷ lệ) cho hướng quay, cho phép robot di chuyển với tốc độ nhanh nhất có thể dọc theo đường đi.
Chú giải:
P controller: bộ điều khiển chỉ dùng thành phần tỷ lệ (Proportional) để điều chỉnh sai số
Heading: hướng quay của robot (góc xoay)
Waypoints (Các loại điểm đường)
Có 5 loại waypoint:
StartWaypoint – điểm bắt đầu của đường đi
GeneralWaypoint – waypoint thông thường, dùng thuật toán look-ahead
InterruptWaypoint – waypoint cho phép thực hiện hành động xen ngang
PointTurnWaypoint – waypoint dừng lại, quay tại chỗ rồi tiếp tục
EndWaypoint – waypoint kết thúc đường đi
Waypoint bắt đầu là điểm đầu tiên của path; waypoint kết thúc là điểm cuối cùng.
Phân biệt chi tiết
GeneralWaypoint: robot di chuyển theo thuật toán pure pursuit thông thường
PointTurnWaypoint: robot dừng lại → quay → tiếp tục
InterruptWaypoint: một dạng PointTurnWaypoint, cho phép thực hiện hành động khác (ví dụ: nhặt Skystone)
Creating Waypoints (Tạo Waypoint)
Bạn có thể tạo waypoint bằng cách gọi các constructor khác nhau.
StartWaypoint
GeneralWaypoint
Mỗi GeneralWaypoint sẽ kế thừa (inherit) cấu hình từ waypoint trước đó trong path.
Chỉ bắt buộc xác định x và y
Có thể tùy chỉnh các tham số khác
Quá trình kế thừa này diễn ra trong phương thức init() của Path.
PointTurnWaypoint
Buffer ở đây là sai số cho phép (expected error) – dùng để tạo dung sai cho việc robot có thể lệch nhẹ khỏi vị trí hoặc góc mong muốn.
InterruptWaypoint
InterruptAction là một interface cho phép người dùng tự định nghĩa hành động tùy chỉnh tại waypoint này.
Khuyến nghị dùng chung với command-based paradigm của FTCLib.
Ví dụ dùng lambda (Java 8):
EndWaypoint
Lưu ý: EndWaypoint bắt buộc phải có preferred angle (góc ưu tiên).
Creating the Path (Tạo Path)
Trước khi gọi loop() hoặc followPath():
Nếu path không hợp lệ, chương trình sẽ ném exception.
Intersections (Điểm giao)
Intersection là điểm mà:
Vòng tròn follow radius quanh robot
Giao với đường path tạo từ các waypoint
FTCLib mặc định dùng order controlled (điều khiển theo thứ tự waypoint), ổn định và ít lỗi hơn so với heading controlled.
Nếu muốn dùng heading controlled (không khuyến nghị):
Retrace (Tái truy vết đường)
Retrace là tính năng độc quyền của FTCLib:
Khi robot mất path
Hệ thống tự động tạo đường tạm quay lại path gần nhất
Mặc định được bật.
Tắt retrace (không khuyến nghị):
Timeouts (Giới hạn thời gian)
Resetting the Path
Using followPath()
followPath() là cách tự động hóa hoàn toàn thuật toán Pure Pursuit.
Hạn chế:
Không gọi được update() của odometry → thay vào đó dùng updatePose().
Creating Your Odometry
Odometry cần được tạo bằng Suppliers (functional interface, dùng lambda).
Creating Suppliers
Using loop()
loop() cho phép bạn tự kiểm soát toàn bộ phần cứng, không cần Suppliers.
double speeds[] = m_path.loop(x, y, heading);
Nếu trả về {0, 0, 0}:
Path timeout
Mất path và retrace bị tắt
Đã đến đích
Using the PurePursuitCommand
Đây là cách khuyến nghị nhất nếu dùng command-based paradigm.
OdometrySubsystem
Subsystem sẽ tự động cập nhật trong periodic().
Creating a PurePursuitCommand
Running the Command
Command được chạy thông qua CommandScheduler, giống các command khác trong FTCLib.