


CÔNG SUẤT ĐỘNG CƠ
Giống như bất kỳ thiết bị điện nào khác, động cơ tiêu thụ dòng điện và sử dụng một lượng công suất nhất định để hoạt động. Động cơ chuyển đổi một phần năng lượng đầu vào thành chuyển động quay của trục — phần này được gọi là công suất đầu ra. Việc hiểu động cơ dưới góc nhìn năng lượng thay vì chỉ nhìn vào tốc độ và mô-men xoắn sẽ giúp việc tính toán, sử dụng và lựa chọn tỉ số truyền phù hợp trở nên dễ dàng hơn.
Công suất là gì?
Về bản chất, công suất được định nghĩa là lượng năng lượng được truyền đi trong một khoảng thời gian nhất định. Trong thực tế, điều này có nghĩa là công suất thể hiện lượng “năng lượng” mà bạn có thể thu được từ động cơ. Công suất đầu ra của một động cơ thay đổi tùy theo mức tải mà động cơ đang chịu, nhưng không thay đổi theo tỉ số truyền (gear ratio) của động cơ. Điều này có nghĩa là một động cơ quay tự do ở tỉ số truyền 1:1 sẽ tạo ra cùng mức công suất như một động cơ quay tự do ở tỉ số truyền 100:1 (nếu bỏ qua ma sát), mặc dù tốc độ và mô-men xoắn của chúng khác nhau. Công suất đầu ra tỷ lệ thuận với tích của tốc độ và mô-men xoắn, nên khi tốc độ và mô-men xoắn thay đổi do hộp số, công suất đầu ra tổng thể vẫn giữ nguyên.
Một thông tin khác - dù không phải lúc nào cũng hữu ích - là công suất đầu vào của động cơ. Công suất đầu vào cho biết động cơ tiêu thụ bao nhiêu watt điện năng, được tính bằng điện áp cấp cho động cơ nhân với dòng điện mà động cơ tiêu thụ. Do động cơ không có hiệu suất 100%, nên để đạt được một mức công suất đầu ra nhất định, bạn thường cần gấp đôi hoặc thậm chí gấp ba lần công suất đầu vào. Ví dụ, một động cơ FTC® tiêu chuẩn có thể tiêu thụ tới 65 watt điện năng chỉ để tạo ra 29 watt công suất đầu ra.
Công suất cực đại và đường cong hiệu suất động cơ:
Để xác định lượng công suất mà động cơ của bạn tiêu thụ hoặc tạo ra, việc tham khảo đường cong đặc tính của động cơ (motor curve) là rất hữu ích. Đây là các bảng dữ liệu thể hiện mối quan hệ giữa tốc độ quay đầu ra, mô-men xoắn đầu ra, công suất đầu ra, và hiệu suất của động cơ — tất cả được biểu diễn trên cùng một đồ thị. Tất cả các động cơ hợp lệ trong FTC (ngoại trừ Core Hex) đều đã được kiểm tra bằng máy đo công suất (dyno test), và dữ liệu của chúng được trình bày bên dưới. Có thể giả định rằng các động cơ khác không bị giới hạn dòng (như servo) cũng có đường cong đặc tính với hình dạng tương tự, mặc dù tốc độ, mô-men xoắn và công suất của chúng có giá trị khác nhau.
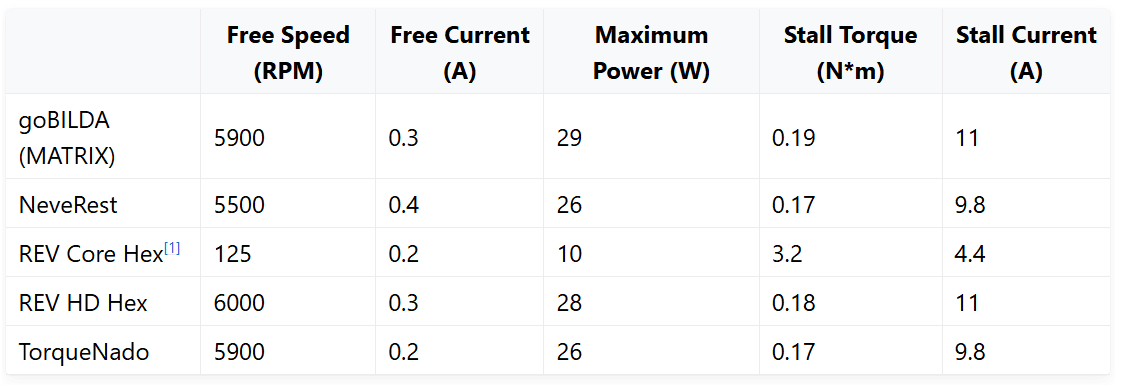
Dữ liệu được lấy trực tiếp từ trang sản phẩm.

Một đường cong đặc tính của động cơ (motor curve) thể hiện hiệu suất của động cơ khi hoạt động ở điện áp 12V (tương đương với việc đặt công suất động cơ bằng 1 trong phần mềm), với các mức tải khác nhau được áp dụng lên trục động cơ. Như bạn có thể thấy, công suất đầu ra của động cơ không cố định — nó tăng dần cho đến khoảng 50% tải, sau đó giảm xuống. Điểm tại mức tải 50% này được gọi là công suất cực đại của động cơ, và vị trí này (50% tải) là tương tự đối với tất cả các loại động cơ hợp lệ trong FTC.
Sự thay đổi công suất của động cơ có nghĩa là tốc độ và mô-men xoắn đầu ra không thay đổi tuyến tính khi tải tác dụng lên trục tăng lên. Nghe có vẻ trái ngược với bình thường, nhưng khi áp dụng tải bằng 50% tải dừng, tốc độ của động cơ không giảm còn một nửa, mà chỉ giảm xuống một chút trên mức 50% tốc độ ban đầu. Tương tự, khi tải vượt quá 50%, tốc độ của động cơ sẽ giảm nhanh hơn mức tuyến tính.
Ngoài ra, có thể thấy rằng hiệu suất của động cơ tăng lên khi tốc độ quay tăng. Điều này có nghĩa là, nếu dòng điện tiêu thụ là yếu tố cần được quan tâm, thì động cơ nên hoạt động với tải nhỏ hơn 50% mô-men xoắn dừng. Hai đặc tính quan trọng của động cơ - công suất cực đại đạt được ở mức 50% stall torque và hiệu suất cao hơn khi tải thấp hơn - là cơ sở để lựa chọn tỷ số truyền phù hợp. Lý tưởng nhất, tỉ số truyền nên được chọn sao cho mô-men xoắn dừng gấp đôi mô-men xoắn tải trung bình mà động cơ phải chịu. Ngoài ra, nên ưu tiên tỉ số truyền cung cấp mô-men xoắn dư một chút hơn là thiếu, để đảm bảo động cơ hoạt động ổn định và hiệu quả trong điều kiện thực tế.
Lưu ý về mức tiêu thụ dòng điện:
Khi quan sát đường cong đặc tính của động cơ (motor curve), bạn có thể thấy rằng dòng điện tại thời điểm dừng (stall current) của các động cơ FTC có thể lên tới 11A cho mỗi động cơ. Trong khi đó, pin FTC chỉ có thể cung cấp tối đa khoảng 20A trước khi cầu chì (fuse) có nguy cơ bị cháy nổ hoặc ngắt mạch. Tuy nhiên, ngay cả khi chưa chạm đến giới hạn 20A, việc động cơ tiêu thụ quá nhiều dòng vẫn có thể khiến các động cơ khác hoạt động yếu hoặc phản hồi chậm. Vì vậy, cần đặc biệt chú ý để không bao giờ có hơn hai động cơ bị kẹt hoặc dừng (stalled) cùng lúc, nhằm tránh sụt áp, bảo vệ pin và đảm bảo hiệu năng ổn định cho toàn bộ hệ thống robot.
NOTE: Bạn có thể bỏ qua yếu tố này khi làm việc với hệ thống truyền động mecanum, vì loại bánh này thường sẽ trượt trước khi động cơ đạt đến dòng dừng. Tuy nhiên, nếu sử dụng tỉ số truyền quá thấp hoặc dùng hơn 4 động cơ trong hệ thống truyền động bám, thì dòng điện tổng có thể vượt quá giới hạn cho phép của pin FTC, dẫn đến sụt áp, giảm hiệu năng hoặc làm hỏng cầu chì.
Động cơ có thể hút “dòng điện quá độ” (transient current) — tức là dòng điện tăng đột ngột trong thời gian rất ngắn. Hiện tượng này thường xảy ra khi động cơ bắt đầu quay hoặc khi có tải bất ngờ tác dụng lên trục. Mặc dù dòng quá độ thường không đủ lâu để làm nổ cầu chì (fuse), nhưng nó có thể gây ra một số vấn đề khác, chẳng hạn như:
Phản hồi điều khiển chậm hoặc không ổn định nếu dòng quá độ được hút bởi động cơ,
Sụt áp hệ thống (low voltage) nếu dòng quá độ đến từ servo, đặc biệt là ở các servo tốc độ cao như goBILDA Super Speed, vốn đôi khi có thể gây ra hiện tượng này.