DẪN ĐỘNG HOLONOMIC (Holonomic Drivetrains)
Mecanum Drive
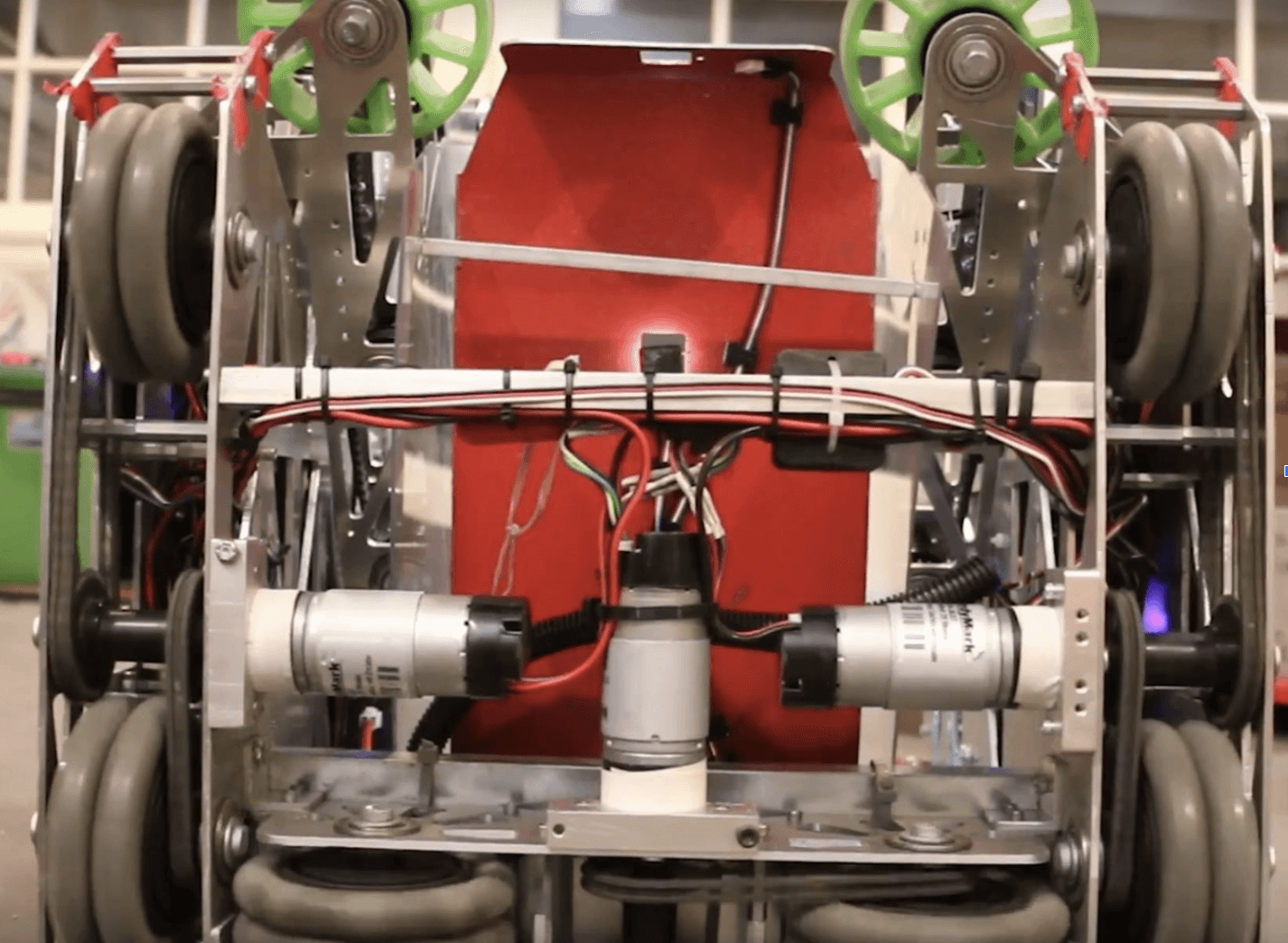
Các hệ dẫn động mecanum bao gồm bốn bánh mecanum (mecanum wheels), mỗi bánh được điều khiển độc lập bởi một mô-tơ. Cấu hình này tạo góc cho vận tốc của từng bánh, cho phép robot strafing (trượt ngang).
Thuật ngữ: Mecanum Wheel
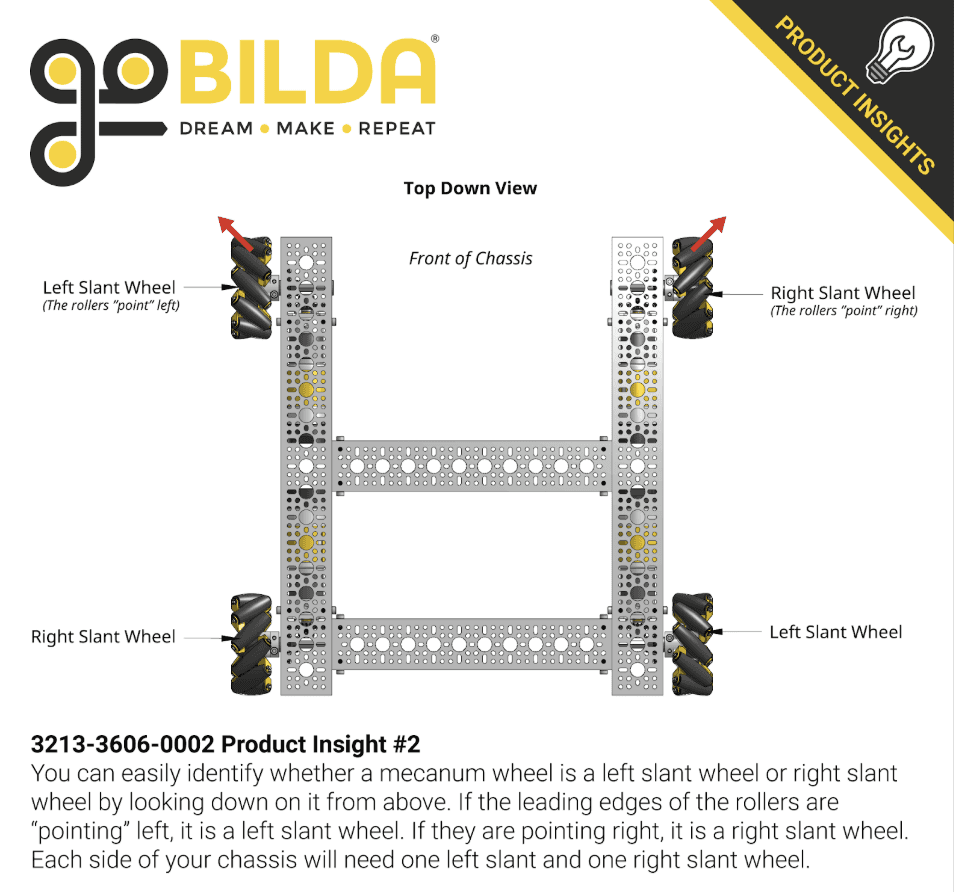
Mecanum wheels là một loại bánh đặc biệt cho phép robot cơ động và strafing holonomic, trái ngược với các bánh thông thường. Chúng bao gồm một loạt các con lăn (rollers) bằng cao su được xoay 45° sang trái hoặc phải.
Trong một hệ dẫn động mecanum truyền thống, việc cho hai bánh ở một đường chéo quay theo chiều ngược với hai bánh ở đường chéo còn lại sẽ tạo ra chuyển động ngang. Sự kết hợp các chuyển động bánh xe này cho phép robot di chuyển theo bất kỳ hướng nào kèm theo bất kỳ dạng quay nào (bao gồm cả việc không quay).
Ưu điểm chính của mecanum drive là khả năng cơ động rất cao, đặc biệt vì robot có thể strafing thay vì phải quay rồi mới chạy. Các con lăn trên bánh mecanum tạo một góc 45° với trục quay của bánh, điều đó nghĩa là drivetrain mecanum không thể strafing nhanh bằng tốc độ chạy thẳng về phía trước.
Điều này được giải thích bằng các lực tác dụng. Khi mỗi bánh quay, nó tạo ra lực ma sát lên mặt đất để di chuyển robot. Khi chạy thẳng, cả hai bánh trái cùng quay một chiều với tốc độ bằng nhau, và tương tự cho bánh phải — lực không đối kháng nhau.
Tuy nhiên, khi strafing, các bánh trái và bánh phải không quay với cùng tốc độ, thậm chí đôi khi quay ngược nhau.
Hai lực đối nghịch này khiến các con lăn trượt ngày càng nhiều, làm thay đổi hướng vận tốc của robot nhưng đánh đổi bằng lực kéo (traction) — trượt nhiều dẫn đến mất tốc độ. Robot vẫn bị trượt khi chạy thẳng, nhưng không nghiêm trọng như khi strafing.
Đây là nhược điểm chính của mecanum drive: lực đẩy yếu và dễ bị các robot tank-drive chắc chắn đẩy lùi trong các tình huống đối kháng.
Do các bánh mecanum dễ trượt hơn vì có con lăn chéo, một bổ sung tùy chọn là hệ odometry riêng để theo dõi vị trí robot khi chạy autonomous.
Chú ý
Điều quan trọng là để tối ưu hiệu suất và độ ổn định, khi nhìn từ trên xuống, các con lăn của mỗi bánh phải hướng vào trung tâm robot, tạo thành hình chữ X, thay vì hình thoi (rhombus).
Lý do chính là cách bố trí này giúp drivetrain quay nhanh hơn nhiều so với cấu hình ngược lại. Khi nhìn từ dưới robot, các con lăn tạo hình thoi, cho phép lực tác dụng lên mặt đất trở nên tiếp tuyến với bán kính quay, nhờ đó quay nhanh hơn.
Ưu điểm
Cơ động và linh hoạt tuyệt vời nhờ khả năng strafing, né phòng thủ rất tốt
Gia tốc tốt, có thể đạt tốc độ tối đa cao
Drivetrain rất linh hoạt, phù hợp với hầu hết mọi game
Nhược điểm
Lực kéo kém, vì con lăn mecanum có hệ số ma sát thấp hơn bánh traction; không vượt địa hình
Dễ bị đẩy khi đối kháng
Mỗi bánh phải truyền động độc lập → không có tính dự phòng
Mecanum Wheels Miniguide
Một trong những đặc điểm quan trọng nhất của bánh mecanum là cơ chế cho phép con lăn quay — dùng bạc đạn (ball bearings) hoặc bạc trượt (bushings). Bánh dùng ball bearings strafing tốt hơn vì con lăn quay với ma sát thấp hơn.
Lưu ý
Ngày trước có đội đầu tư bánh mecanum đường kính 6 inch. Những bánh này đắt hơn nhiều nhưng không mang lại cải thiện hiệu năng đáng kể. Khuyến nghị dùng bánh đường kính 3–4 inch.
Khuyến nghị
Những bánh sau đây được xem là tiêu chuẩn vàng cho mecanum wheels — nếu mua mới thì hầu như không có lý do chọn loại khác.
goBILDA Mecanum Wheels v2
($127.49 sau giảm giá đội):
Đường kính 96 mm
Dày 38 mm
Con lăn dùng ball bearing, độ cứng 70A
Strafing rất tốt
Nhiều tùy chọn lắp trục nhất (16×16mm, 32×32mm)
Tương thích mọi kiểu trục phổ biến trong FTC
REV Robotics Mecanum Wheels
($127.50 sau giảm giá đội):
Đường kính nhỏ: 75 mm
Dày 40.8 mm
Con lăn dùng ball bearing → strafing rất tốt
Tương thích Andymark Nubs & REV Hex Adapter v2 (kèm theo)
Các kiểu trục khác cần adapter hoặc chỉnh sửa vật lý
Có thể sử dụng (Viable)
Những bánh này dùng được nhưng đã lỗi thời và bị thay thế bởi loại tốt hơn.
Nexus Ball Bearing Mecanum Wheels
($134.00)
Đường kính 100 mm
Rộng 59 mm
Strafing xuất sắc do dùng ball bearings
Nhược: đắt hơn, chiếm nhiều không gian, ma sát thấp, khó lắp hơn loại khuyến nghị
goBILDA Mecanum Wheels v1 (ngừng sản xuất)
Tương tự Nexus nhưng màu khác, khả năng lắp tốt hơn
Andymark Heavy Duty Mecanum Wheels
($225)
Đắt nhất danh sách
Đường kính 4”
Rộng 1.65”
Dùng bushings → strafing ổn nhưng kém các loại dùng ball bearings
Ma sát tốt hơn bánh Nexus bearing/bushing
Nexus Bushing Mecanum Wheels
($80.00)
Phiên bản dùng bushings của loại Nexus Ball Bearing
Strafing ổn nhưng kém loại dùng bearing
Không khuyến nghị
Những bánh này hoạt động rất kém và không rẻ hơn bao nhiêu.
TETRIX Mecanum Wheels
($149.00)
Dùng con lăn nhựa cứng + bushing → strafing rất tệ
Hub tích hợp dùng vít siết (set screw) với bore tròn → dễ trượt, kém tin cậy, chiếm không gian
Andymark Standard Duty Mecanum Wheels
($77.00)
Hầu như không strafing được
Rất dễ gãy
X-Drive
X-Drive là một drive holonomic dùng bánh omni. Loại drive này gắn 4 bánh omni ở bốn góc robot, mỗi bánh đặt góc 45°.
Một khác biệt lớn giữa X-Drive và mecanum: tốc độ strafing.
Với mecanum, tốc độ strafing < tốc độ chạy thẳng.
Với X-Drive, tốc độ strafing = tốc độ chạy thẳng, do bố trí bánh có đối xứng quay.
Tuy nhiên, khi strafing góc 45°, tốc độ chỉ khoảng √2/2 ≈ 0.707 lần tốc độ chạy thẳng.
X-Drive có khả năng quay và gia tốc tốt, nhưng nhược điểm chính là packaging (khả năng bố trí vào khung robot). Vì bánh bị lệch, việc thiết kế cơ cấu quanh drivetrain khó hơn. Truyền động từ mô-tơ đến bánh cũng khó gọn → đa số X-Drive phải dùng direct drive, gây giảm tuổi thọ động cơ.
Lưu ý
Dengan X-Drive, robot di chuyển tiến/lùi/trái/phải nhanh hơn √2 lần so với drive bánh đặt theo hướng tiêu chuẩn (cùng tỉ số truyền và kích thước bánh).
(Phần phân tích có trong bản gốc.)
Ưu điểm
Cơ động và linh hoạt tốt
Gia tốc tốt
Nhược điểm
Dễ bị đẩy khi đối kháng
Thường phải dùng direct drive vì form factor bất tiện

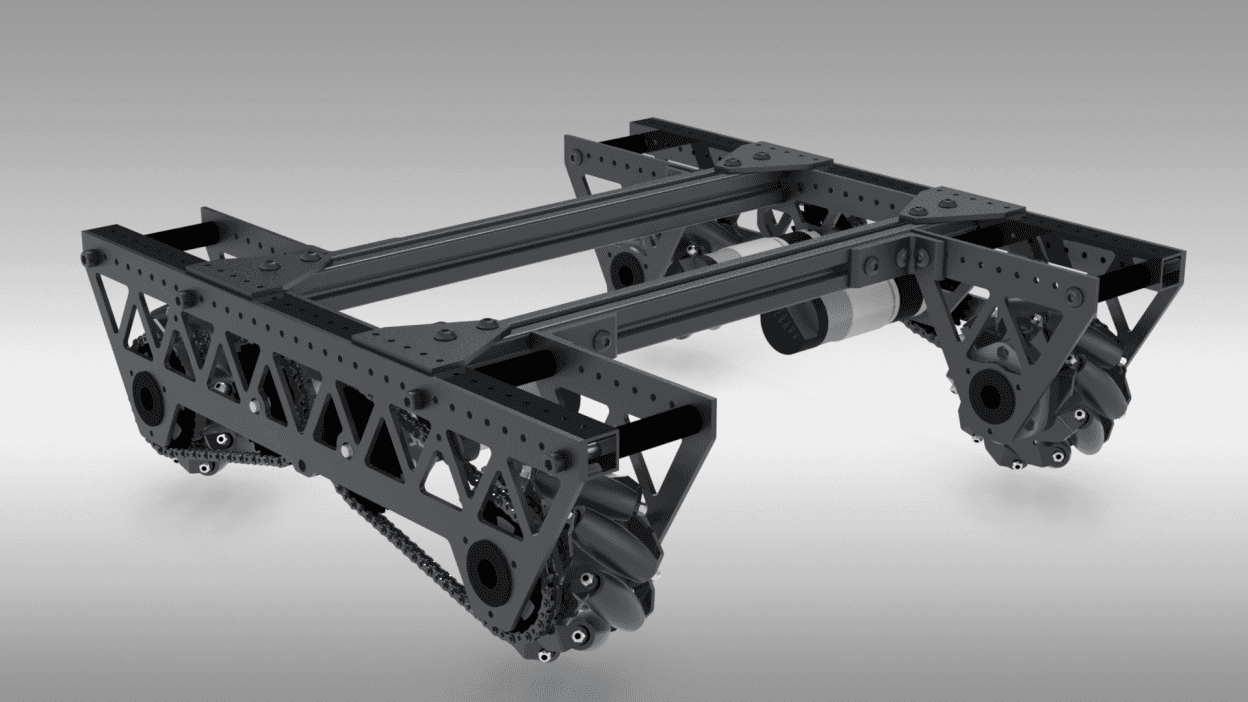
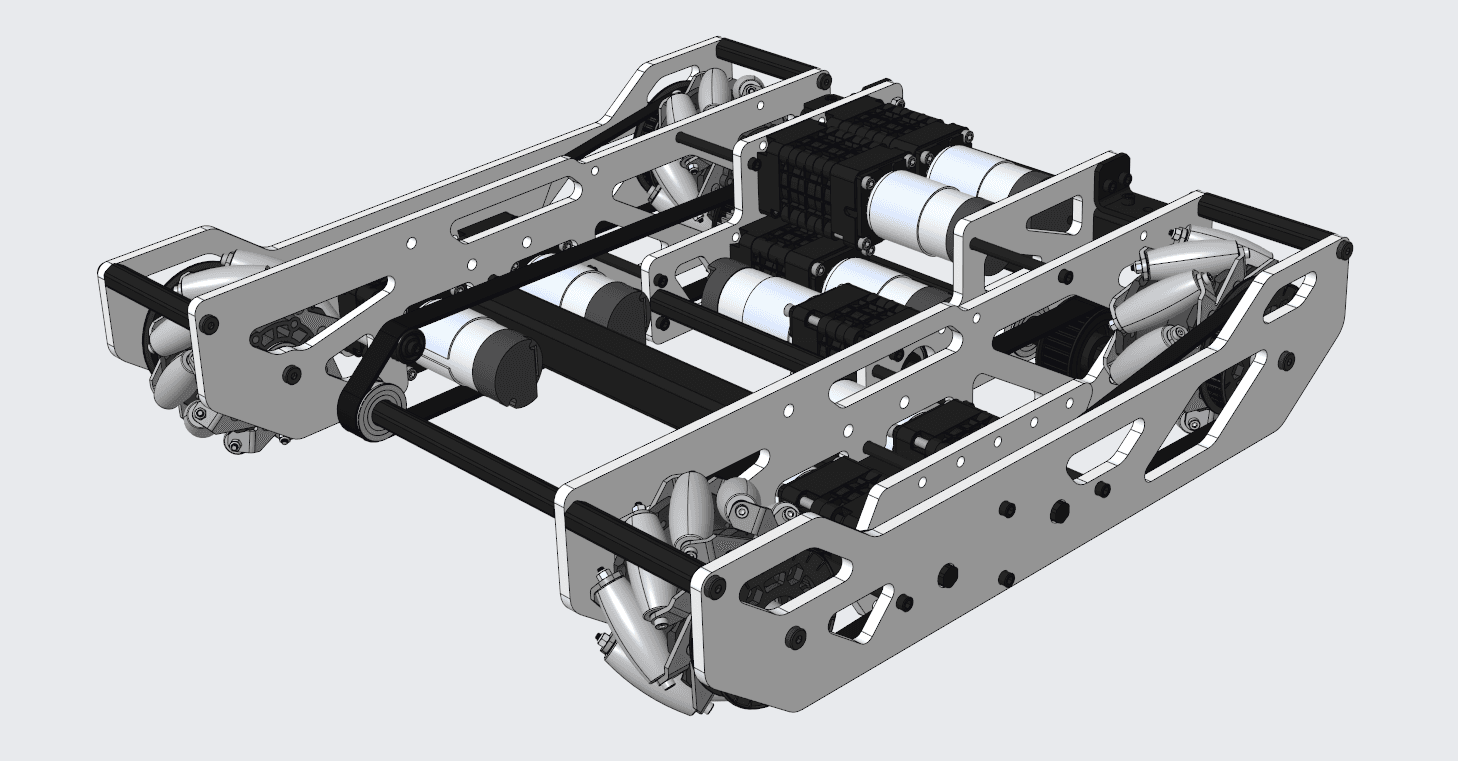
H-Drive
H-Drive (còn gọi là U-drive tùy cấu hình) là drive holonomic sử dụng toàn bộ bánh omni. Nó dùng một bộ “bánh strafing” đặt vuông góc với bánh chạy thẳng để tạo khả năng strafing. H-Drive giống như sự kết hợp giữa tank drive và holonomic drive.
H-Drive rất dễ lập trình về lý thuyết, nhưng đa số đội dùng gyro để hiệu chỉnh khi strafing để đi thẳng (dù nếu phân bố khối lượng tốt thì không bắt buộc).
H-Drive có nhiều cấu hình mô-tơ:
1 hoặc 2 mô-tơ cho mỗi cụm drive tiến/lùi
1 hoặc 2 mô-tơ cho bánh strafing
Khi dùng 1 mô-tơ cho mỗi cụm drive tiến/lùi, H-Drive có gia tốc hơi kém hơn mecanum.
Để tối ưu độ tin cậy, nhiều đội FRC® treo bánh strafing trên hệ rocker để đảm bảo mọi bánh đều chạm đất khi robot không strafing.
Ưu điểm lớn nhất của H-Drive là khả năng phân phối mô-tơ linh hoạt.
Nếu dành 3 mô-tơ cho cơ cấu và còn dư 1 mô-tơ → có thể dùng 1 mô-tơ strafing + 4 mô-tơ drive
Nếu dành 5 mô-tơ cho cơ cấu → cấu hình 2 mô-tơ drive + 1 mô-tơ strafing là tối ưu
Ưu điểm
Kết hợp ưu điểm của tank và holonomic
Có thể dùng với 3 hoặc 5 mô-tơ
Lực kéo tốt, tốc độ cao
Cơ động và linh hoạt tốt
Nhược điểm
Strafing kém hơn mecanum một chút
Đôi khi cần hệ treo phức tạp tùy thiết kế