


IQ Smart Motor chuyển đổi năng lượng từ pin robot thành chuyển động, cung cấp lực cho các chức năng khác nhau của robot như bánh xe, tay nâng, kẹp và các cơ cấu thao tác khác. Bài viết này sẽ hướng dẫn bạn qua những vấn đề thường gặp khi lắp ráp với IQ Smart Motor và các giải pháp để khắc phục.
IQ Smart Motor
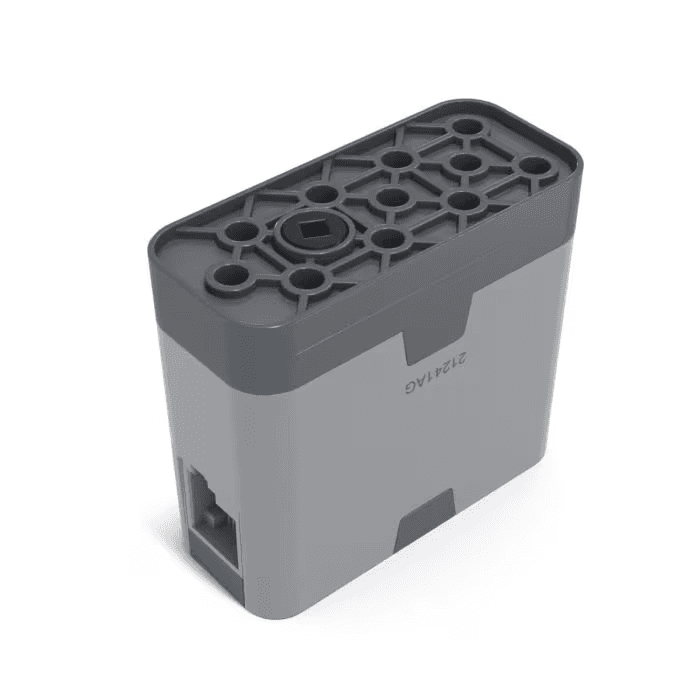
Hình ảnh IQ Smart Motor nhìn từ góc nghiêng.
IQ Smart Motor của bạn, một linh kiện hình chữ nhật màu xám dễ nhận biết, có ba đặc điểm chính:
Các lỗ lắp để gắn chắc chắn vào mô hình
Một ổ cắm đầu ra hình vuông nằm cạnh các lỗ lắp, giúp truyền lực hiệu quả
Cổng Smart Cable để kết nối và điều khiển từ Robot Brain
Để tìm hiểu chi tiết về thông số kỹ thuật của IQ Smart Motor, hãy xem bài viết tương ứng trong VEX Library.
Các vấn đề và giải pháp khi lắp ráp với IQ Smart Motor
Vấn đề: Động cơ cảm giác không chắc chắn
Giải pháp: Sử dụng 11 lỗ lắp ở mặt trên của động cơ. Số lượng chốt (pins) càng nhiều thì kết cấu càng chắc do có nhiều điểm liên kết hơn. Smart Motor nên được xem như một linh kiện kết cấu quan trọng, cần được gắn thật vững. Giải pháp này được minh họa trong hướng dẫn 3D.
Giống như các linh kiện xây dựng tiêu chuẩn khác, động cơ có các lỗ lắp tương thích với mọi loại pins và standoffs trong bộ kit, đảm bảo kết nối chắc chắn. Hãy xem hướng dẫn 3D để thấy Smart Motor được gắn với một Beam bằng pins và một Motor Shaft.
Để gắn Smart Motor vào mô hình, trước tiên hãy ấn các pins vào các lỗ lắp. Sau đó, đặt và ấn beam của robot lên trên các pins để cố định beam vào động cơ.
Danh mục Pins và Standoffs như hiển thị trên poster linh kiện VEX IQ.
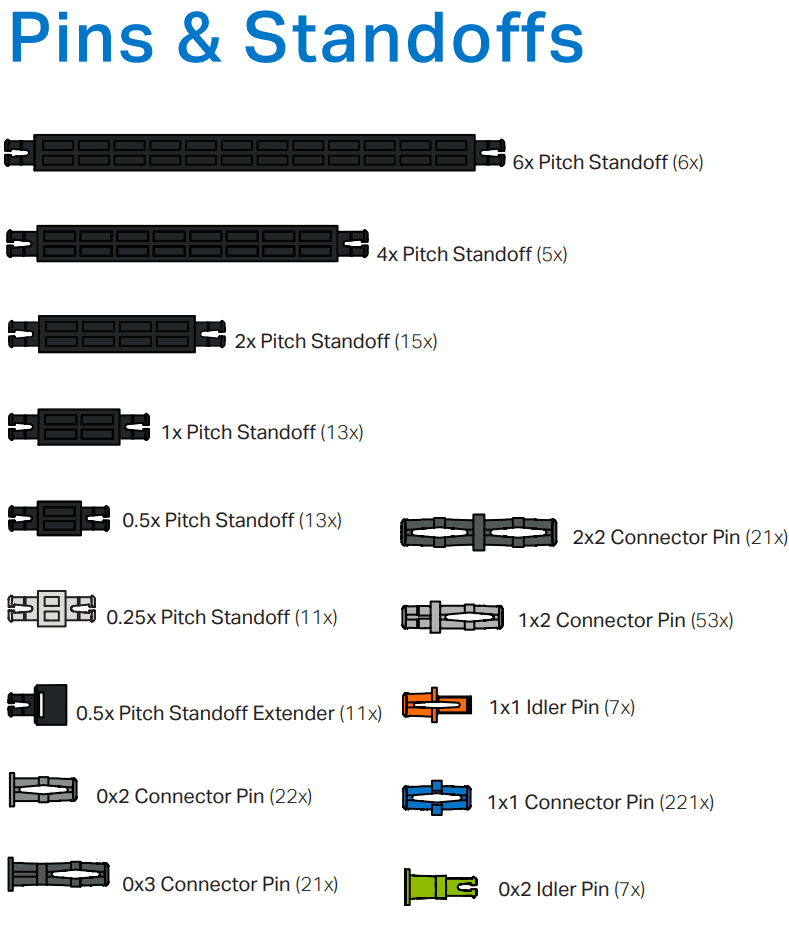
Việc tháo pins bằng tay có thể khá khó sau khi đã lắp vào. Để biết thêm thông tin về cách tháo các pins khó, hãy xem bài viết trong VEX Library hướng dẫn sử dụng Pin Tool.
Lắp đặt IQ Smart Motor
Caps
Motor Support Caps cho phép hai động cơ được đặt cạnh nhau thành một cụm bằng cách sử dụng các lỗ lắp và connector pins. Motor Support Cap giúp ngăn động cơ bị xê dịch khi robot chuyển động và duy trì độ ổn định của kết cấu, như minh họa trong hướng dẫn 3D.
Mount
Mount bao gồm bốn beam 2×10 đỡ hai động cơ được nối với nhau bằng Dual Motor Support Cap. Các shafts gắn vào động cơ tạo điểm tựa để lắp bánh xe, và các beam ở phía trên và phía dưới Mount cho phép cấu trúc này dễ dàng gắn vào khung robot lớn hơn bằng pins. Thiết kế Mount này được minh họa trong hướng dẫn 3D đi kèm.
Motor Drivetrain
Motor Drivetrain là hệ thống chịu trách nhiệm cho chuyển động của robot. Drivetrain bao gồm động cơ được gắn với cấu trúc robot lớn hơn, bao gồm thân chính và bánh xe. Drivetrain chuyển đổi công suất từ động cơ thành chuyển động, cho phép robot tiến, lùi và rẽ. Hãy xem một robot sử dụng Motor Drivetrain trong hướng dẫn 3D.
Vấn đề: Động cơ khó lắp (Problem: The Motors are Difficult to Mount)
Giải pháp: Một số điểm cần lưu ý để lắp động cơ hiệu quả:
Đảm bảo cổng Smart Cable dễ tiếp cận
Tránh để động cơ va chạm hoặc cản trở các cơ cấu khác
Đặt ổ cắm đầu ra hình vuông sao cho truyền lực đúng mục đích thiết kế
Nếu bạn mới bắt đầu, hãy lắp ráp các mô hình trong IQ Education Kit tại builds.vex.com. Việc làm quen với các phương pháp lắp ráp hiệu quả sẽ giúp ích cho các dự án sau này.
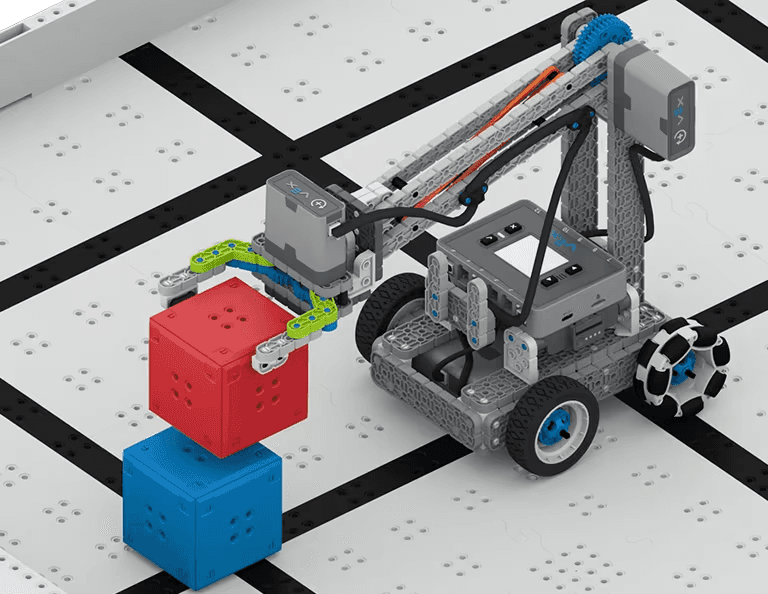
Hình ảnh minh họa robot IQ Clawbot sử dụng Smart Motors hiệu quả cho drivetrain, tay nâng và cơ cấu kẹp.
IQ Clawbot sử dụng kẹp để xếp các khối lập phương màu một cách cẩn thận.
Vấn đề: Động cơ không làm cơ cấu chuyển động
(Problem: The Motor isn't Moving the Mechanism)
Giải pháp: Ổ cắm hình vuông đặc trưng của động cơ cho phép kết nối trục (shaft) một cách đơn giản. Để khai thác hết công suất, trước tiên bạn cần gắn một trục truyền động. Hãy đưa bất kỳ shaft nào vào ổ cắm cho đến khi nó nằm sát bề mặt động cơ, đảm bảo truyền lực liên tục. Nếu động cơ đã gắn nhưng không quay, hãy kiểm tra lại xem shaft đã được cắm hết chưa; đôi khi trục có thể bị trượt ra ngoài trong quá trình sử dụng robot. Như minh họa trong hướng dẫn 3D bên dưới, bất kỳ shaft nào cũng có thể được lắp vào ổ cắm của động cơ trong quá trình lắp đặt.
Nhờ hình dạng vuông, mọi shaft đều có thể vừa với ổ cắm đầu ra của động cơ, dẫn truyền lực đến cơ cấu cần thiết. Chỉ cần đẩy shaft vào hết cho đến khi nó nằm sát bề mặt động cơ để đảm bảo truyền lực trơn tru.
Danh mục Shafts như hiển thị trên poster linh kiện VEX IQ.
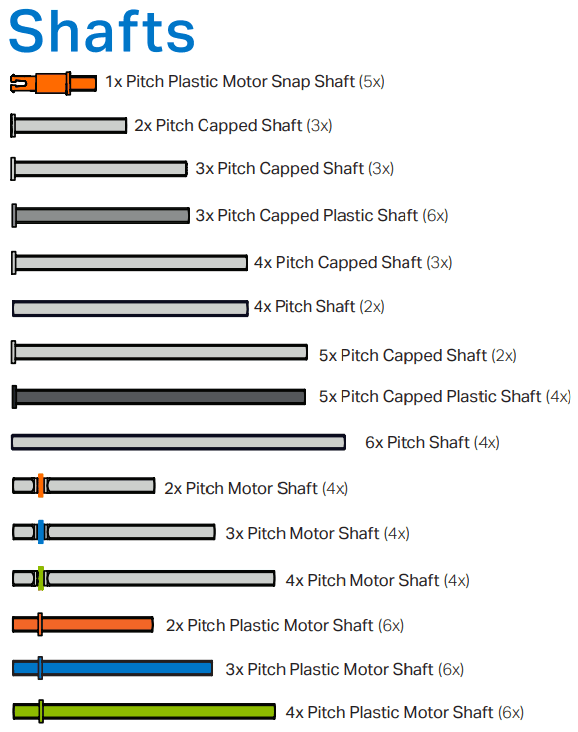
Để biết thêm thông tin về cách chọn, cố định và đỡ các shaft trong VEX IQ, hãy xem bài viết liên quan trong VEX Library.
Cần hỗ trợ thêm? Hãy khám phá mục Mechanical trong VEX IQ Library để tìm hiểu về các cơ cấu, cụm lắp ráp và drivetrain. Để học thực hành, bạn có thể bắt đầu với các mô hình IQ tại builds.vex.com để xem ví dụ lắp đặt động cơ.