

Việc di chuyển là một chức năng cơ bản của hầu hết các robot. Việc lựa chọn loại bánh xe phù hợp có thể là một quyết định mang tính then chốt và có thể quyết định sự thành công của thiết kế robot; mỗi loại bánh xe đều có những ưu điểm và nhược điểm riêng. Hai yếu tố chính cần cân nhắc là đường kính bánh xe — khoảng cách từ một điểm ở một bên bánh xe tới điểm đối diện trực tiếp ở bên kia — và độ bám.
Bánh xe và Lốp VEX
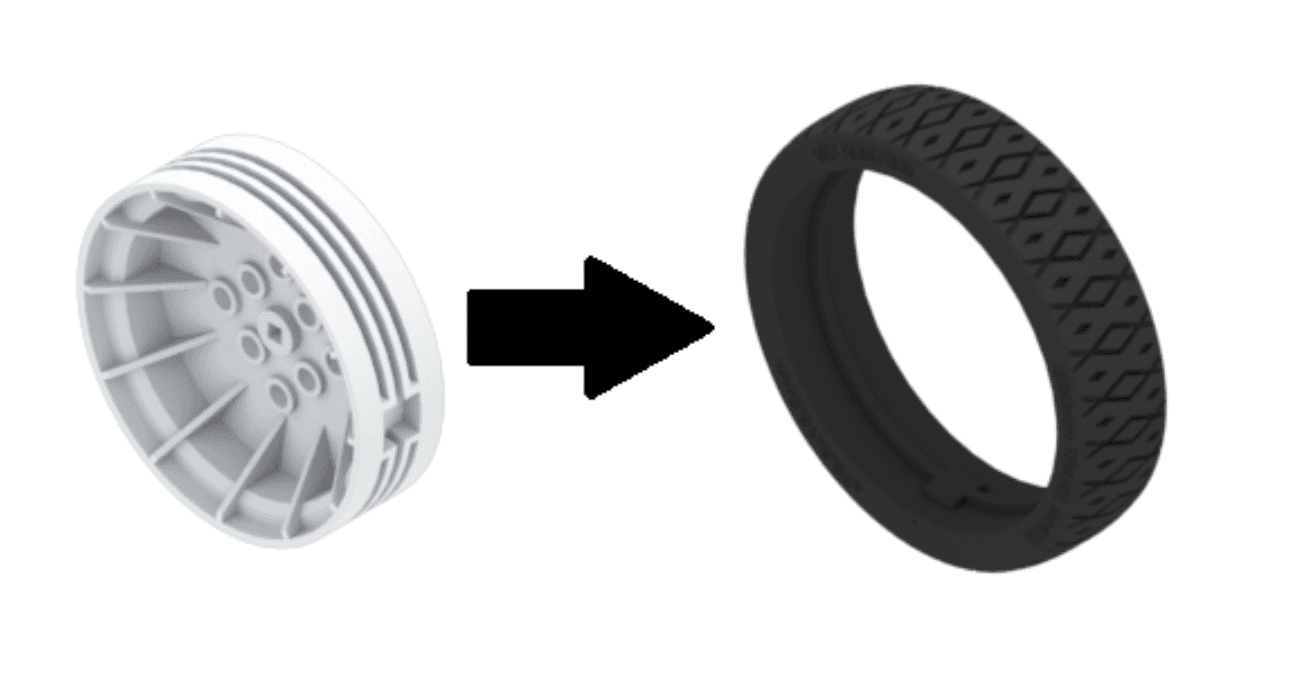
Bánh xe dẫn động
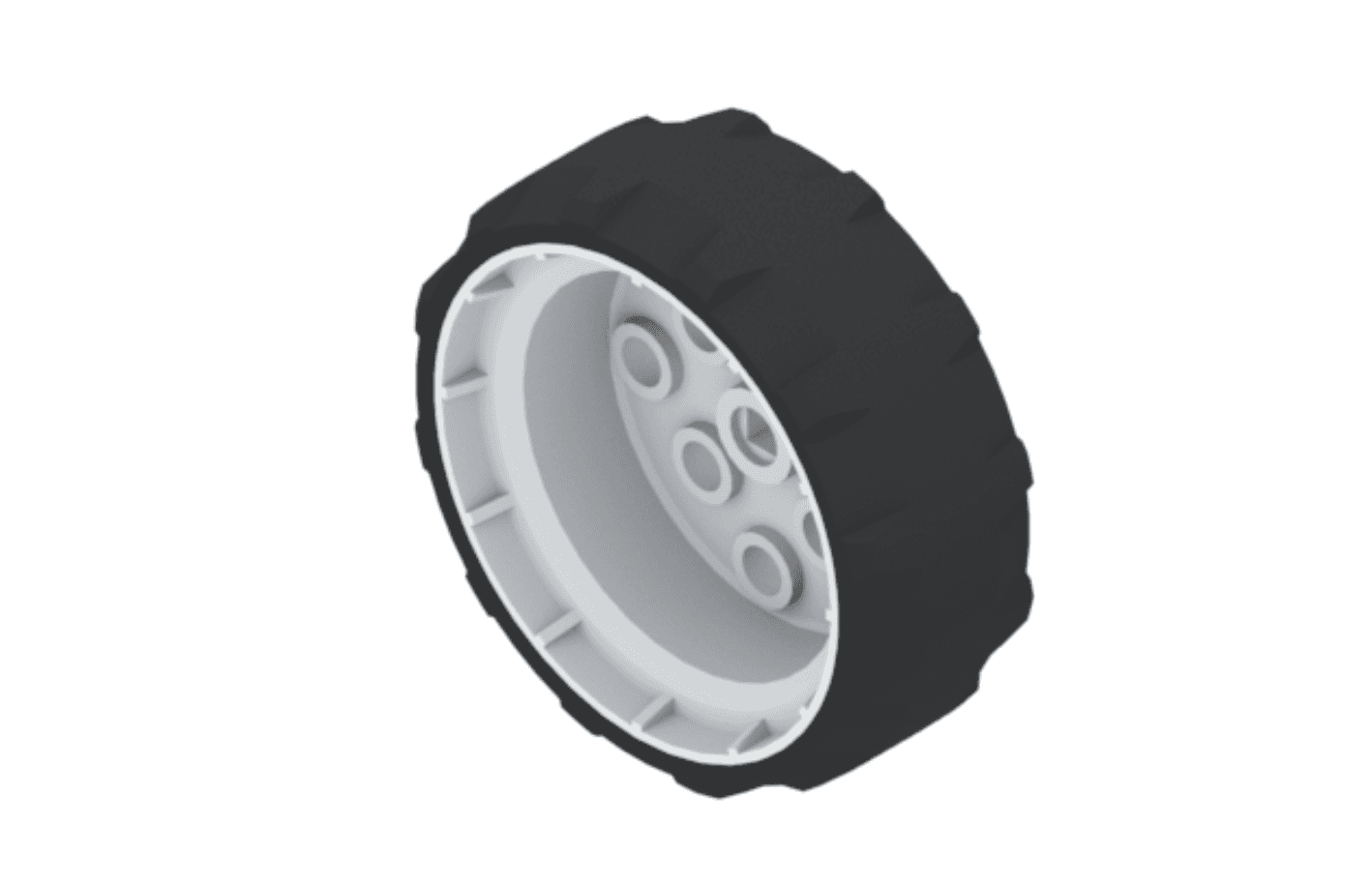
Đây là các bánh xe VEX IQ nguyên bản. Các lốp này được làm từ cao su rất dày, giúp chúng trở thành bánh xe dẫn động rất hiệu quả. Đường kính của chúng được thiết kế sao cho mỗi vòng quay của bánh xe khiến robot di chuyển một quãng đường chính xác.
Bánh xe 160mm Travel Wheel và 200mm Travel Wheel là những bánh xe được sử dụng phổ biến nhất trên khung gầm (chassis) VEX IQ. Bánh 200mm Travel Wheel kết hợp rất tốt với 200mm bánh Omni-directional để tạo ra một khung gầm ổn định và dễ xoay. Cả hai loại bánh này đều được ép chặt lên 44mm Wheel Hub.

Bánh 250mm Travel Wheel phù hợp cho các robot cần khoảng sáng gầm lớn hơn (ground clearance) hoặc tốc độ cao hơn. Bánh này được ép lên 64mm Wheel Hub

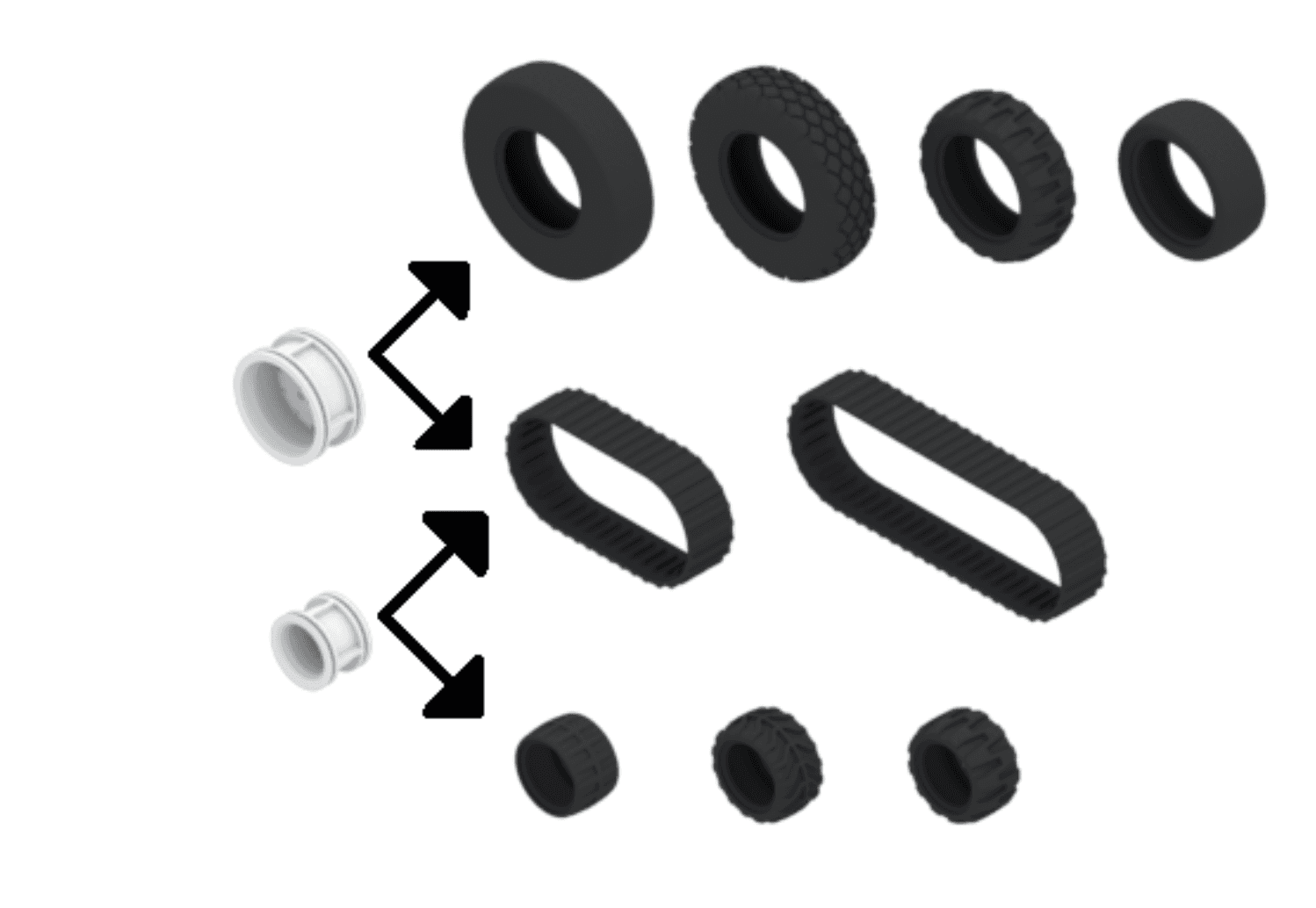
Bánh xe intake
Những bánh xe VEX IQ thế hệ mới này tương thích với nhiều loại lốp mới, cũng như băng xích (tank treads). Chúng mềm hơn bánh xe dẫn động, vì vậy không phù hợp cho hệ truyền động (drivetrain) — vốn yêu cầu đường kính ổn định để thực hiện các chuyển động chính xác.
Chúng hoạt động tốt nhất cho cơ cấu intake và các ứng dụng thao tác vật thể trong game (game object manipulation).
Lốp 7x Pitch Balloon và 5x Pitch Balloon đều sử dụng chung 48.5mm Wheel Hub. Chúng hoạt động rất hiệu quả khi cần độ nén lớn để gắp hoặc giữ vật thể. Ngoài ra, chúng cũng rất phù hợp cho flywheel launcher (bộ phóng bánh đà).
Băng xích có thể lắp lên cả 48.5mm và 32.2mm Wheel Hub, cho phép robot vận chuyển vật thể trên quãng đường dài.
Lốp 3x Pitch Balloon và 3.5x Pitch Balloon đều có thể lắp lên 32.2mm Wheel Hub. Những bánh xe nhỏ nhưng mềm này rất phù hợp để di chuyển quanh các vật thể ở những nơi mà bánh xe lớn không thể lắp vừa.
Bánh xe ma sát thấp
Những bánh xe này có độ bám thấp, nhưng rất hữu ích trong các ứng dụng cần lăn với ma sát nhỏ. Chúng đặc biệt phù hợp khi robot cần tì hoặc phản lực lên tường hay các phần tử của sân thi đấu mà không bị lực cản từ các bánh xe không được truyền động.
Bánh 4x Pitch Diameter (160mm Travel) ma sát thấp có bề mặt nhẵn và tám lỗ gắn để có thể gắn thêm các bộ phận khác lên bánh. Ở giữa có lỗ tròn trung tâm, cho phép bánh quay tự do quanh pin hoặc shaft (trục). Trong hầu hết các trường hợp, cần sử dụng Shaft Collar (vòng chặn trục) cùng với loại bánh này.
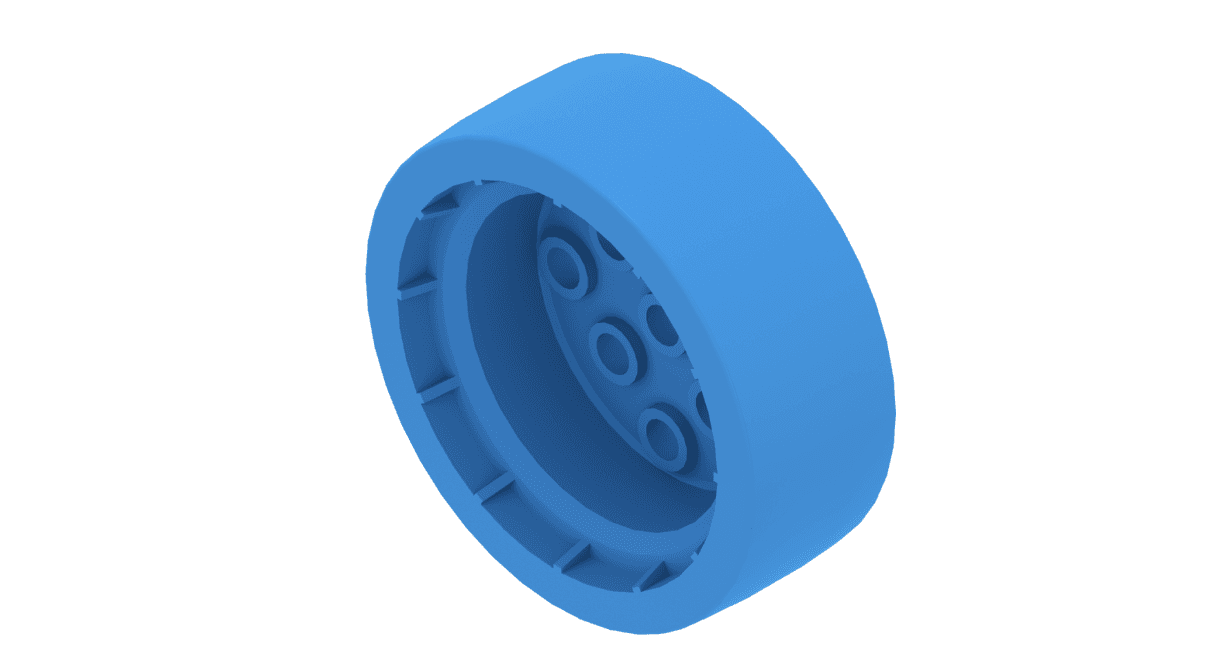
“Rover wheels” được thiết kế mô phỏng theo bánh xe kim loại được sử dụng trên các robot thám hiểm của NASA (NASA rovers).
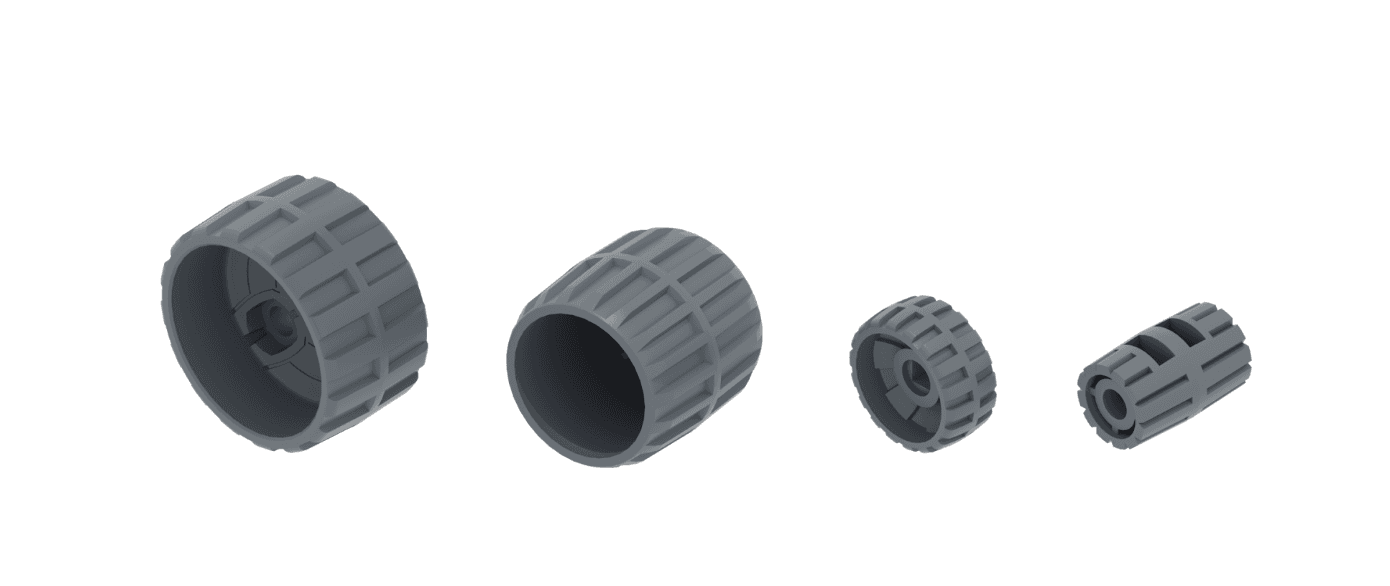
Bánh xe đặc biệt
Bánh 160mm Travel Smooth Wheel là bánh xe VEX IQ duy nhất có gai (tread) được đúc liền vĩnh viễn với hub. Nó có đường kính ngoài giống hệt bánh xe dẫn động thông thường.
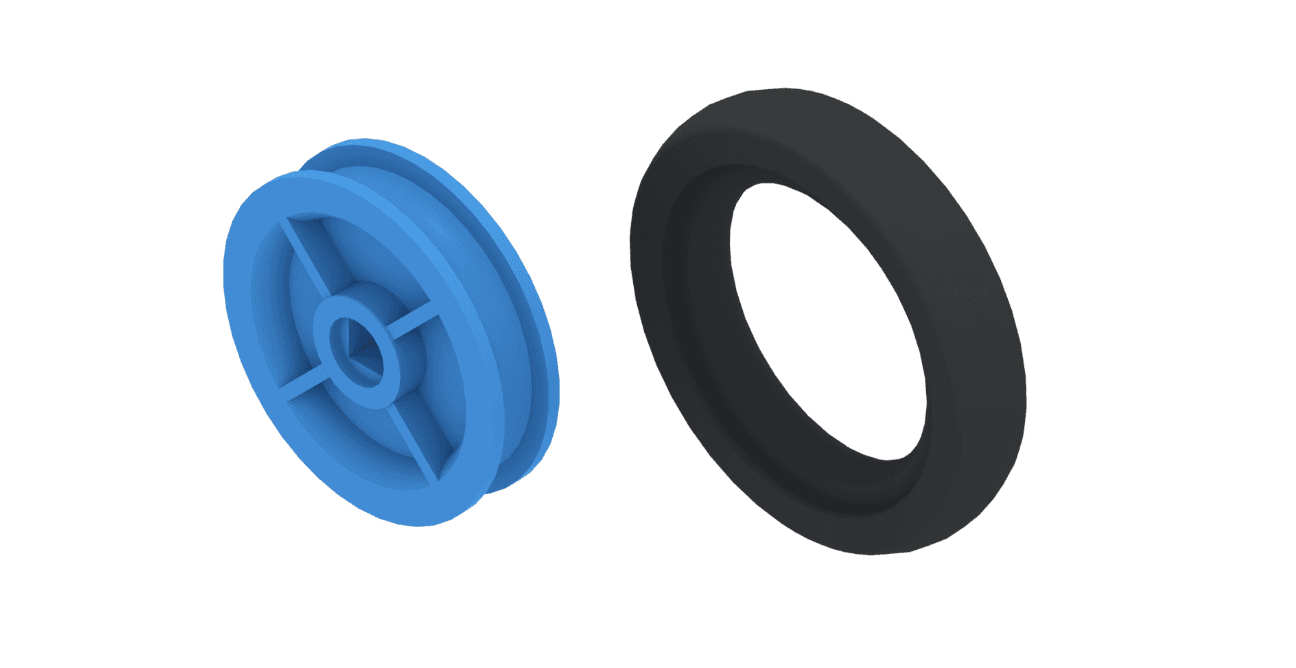
Lốp 100mm Travel biến 20mm Pulley thành một bánh xe nhỏ, cấu hình thấp (low-profile). Nó hoạt động hiệu quả khi cần độ bám, nhưng các bánh xe khác không thể lắp vừa không gian.
Bánh 200mm Omni-directional Wheel có một loạt các con lăn đôi (double-set rollers) được bố trí xung quanh chu vi bánh xe. Điều này cho phép bánh xe lăn ngang (side-to-side) bên cạnh việc lăn tiến và lăn lùi. Các con lăn của bánh omni-directional giúp robot xoay dễ hơn rất nhiều so với lốp cao su. Chúng hoạt động tốt nhất khi được sử dụng kết hợp với 200mm Traction Wheel (ví dụ: hai bánh omni-directional và hai bánh traction) để tạo ra một khung gầm cân bằng và xoay ổn định.
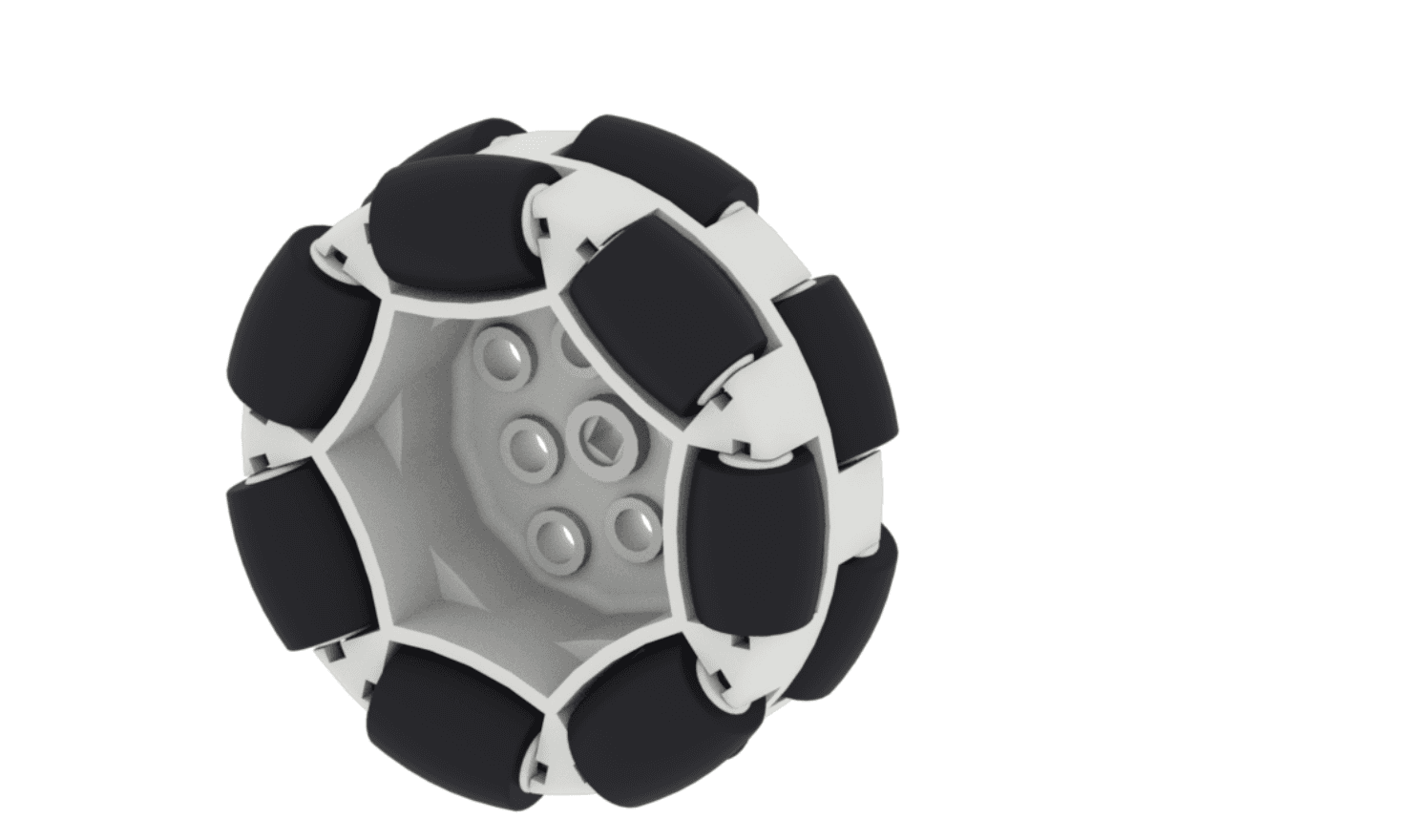
Việc sử dụng các cách định hướng đặc biệt (special orientations) của bánh omni-directional cho phép thiết kế các hệ truyền động nâng cao, có thể di chuyển tiến/lùi và sang ngang (side to side- omni-directionally). Bánh omni-directional được bao gồm trong IQ (2nd gen) Education and Competition kits, IQ Competition Add-on Kit, và các bộ 2 bánh (2-packs).
Sử dụng dầm khóa tròn lệch tâm 2x2 (2x2 Center Offset Round Lock Beam)
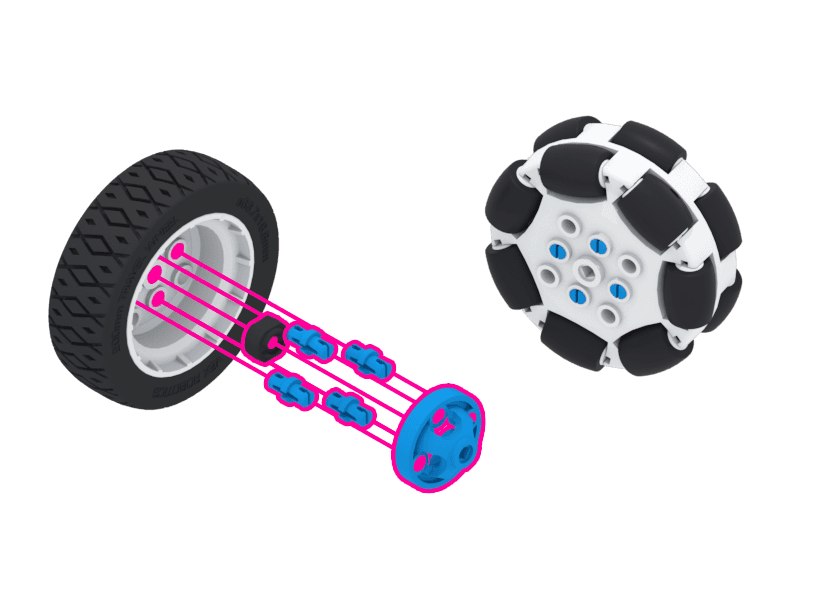
Việc lắp 2x2 Center Offset Round Lock Beam vào các bánh xe tương thích (Small và Large Wheel Hub, 48.5mm Hub, và 200mm Omni-directional Wheel) như trong hình minh họa sẽ tạo ra một bánh xe ít bị trượt then (strip out) hơn và không bị cong khi chịu tải lớn.
So sánh các bánh xe VEX IQ
Lốp / Bánh xe | Quãng đường mỗi vòng quay | Diện tích tiếp xúc mặt đất | Khoảng sáng gầm | Độ bám | |
Lốp 100mm | 100mm (3.94 inches) | Lớn | Nhỏ | Khá | |
Lốp 160mm | 160mm (6.30 inches) | Trung bình | Trung bình | Rất tốt | |
Lốp 200mm | 200mm (7.87 inches) | Trung bình | Trung bình | Rất tốt | |
Lốp 250mm | 250mm (9.84 inches) | Nhỏ | Lớn | Rất tốt | |
Bánh xe đa hướng 200mm | 200mm (7.87 inches) | Trung bình | Trung bình | Tốt | |
Lốp balloon đường kính 5x pitch (chỉ Gen 2) | 200mm (7.87 inches) | Trung bình) | Trung bình | Rất tốt | |
Lốp balloon rộng 2x, đường kính 3.5 pitch (gai offroad hình thang) | 140mm (5.5 inches) | Trung bình | Nhỏ | Rất tốt |
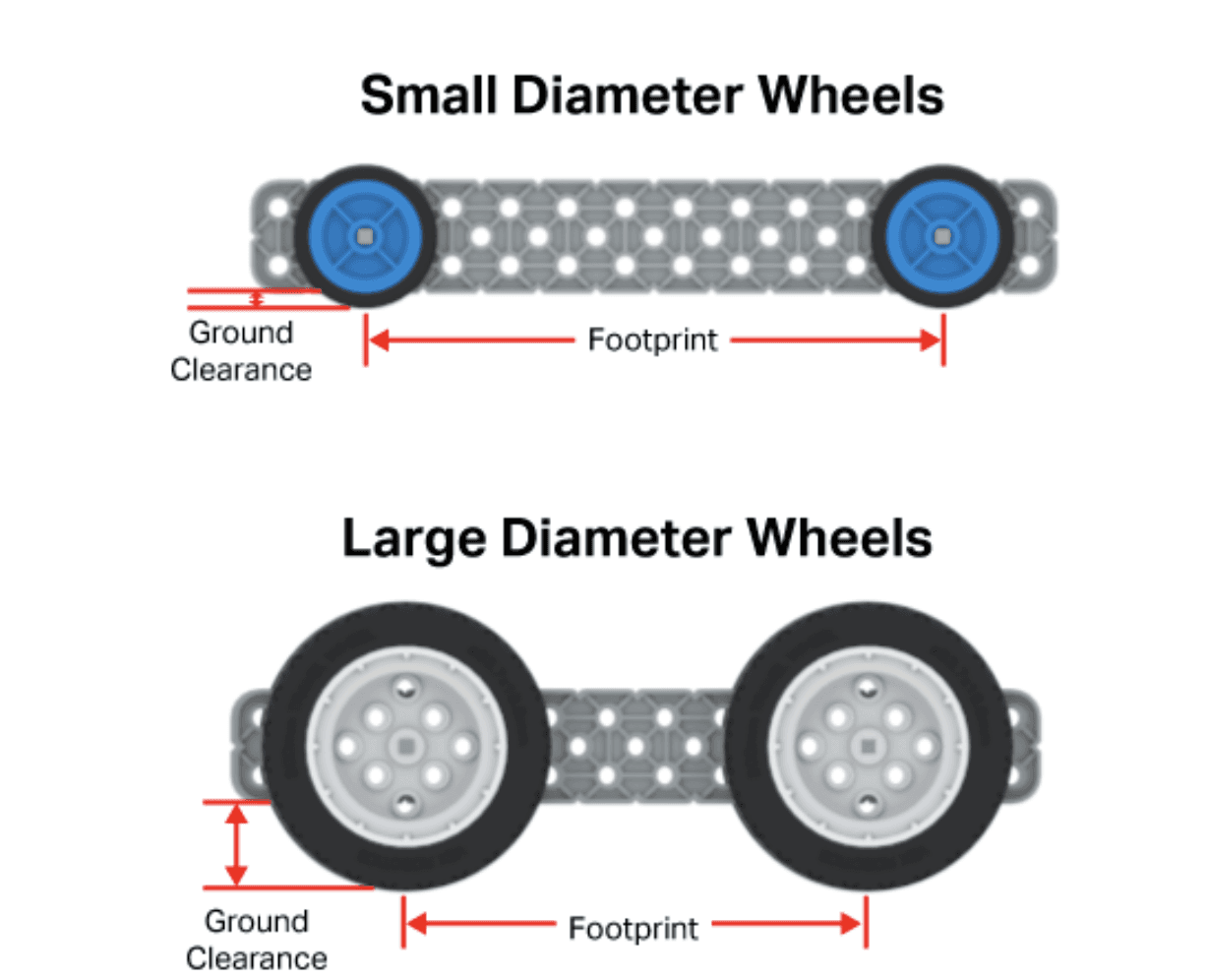
Đường kính
Đường kính của bánh xe (cụm lắp ráp Hub và lốp cao su) có thể ảnh hưởng đến nhiều yếu tố khác nhau.
Quãng đường mỗi vòng quay (Distance per revolution) là quãng đường mà bánh xe lăn được khi hoàn thành một vòng quay đầy đủ, như được minh họa trong hình động bên dưới.
LINK VIDEO: https://content.vexrobotics.com/kb/videos/iq/tire_rotate.mp4
Diện tích tiếp xúc là vùng diện tích giữa các điểm mà những bánh xe ngoài cùng của robot tiếp xúc với mặt đất. Thông thường, footprint càng lớn thì robot càng ổn định và ít có khả năng bị lật.
Khoảng sáng gầm (Ground clearance) là chiều cao từ mặt đất đến kết cấu thấp nhất của robot. Khoảng sáng gầm lớn hơn giúp robot dễ dàng vượt qua chướng ngại vật hơn.
Độ bám
Độ bám của bánh xe càng lớn thì robot có thể đẩy hoặc kéo với lực lớn hơn, đồng thời di chuyển qua chướng ngại vật dễ dàng hơn. Tuy nhiên, nếu bánh xe có độ bám quá cao, robot sẽ khó xoay hơn.
Chú giải thuật ngữ (Supplementary Notes):
Hub: Phần lõi trung tâm của bánh xe, nơi gắn bánh với trục.
Press-fit: Lắp ép chặt bằng lực, không dùng ren.
Pitch: Khoảng cách chuẩn giữa các gờ/lỗ, dùng để xác định kích thước lốp.
Flywheel launcher: Cơ cấu phóng sử dụng bánh đà quay tốc độ cao.
Strip out: Hiện tượng lỗ gắn bị trượt hoặc mòn, làm mất khả năng truyền lực.
Omni-directional: Có khả năng di chuyển theo nhiều hướng khác nhau.