Truyền động trực tiếp (Direct Drive)
Thuật ngữ: Direct Drive
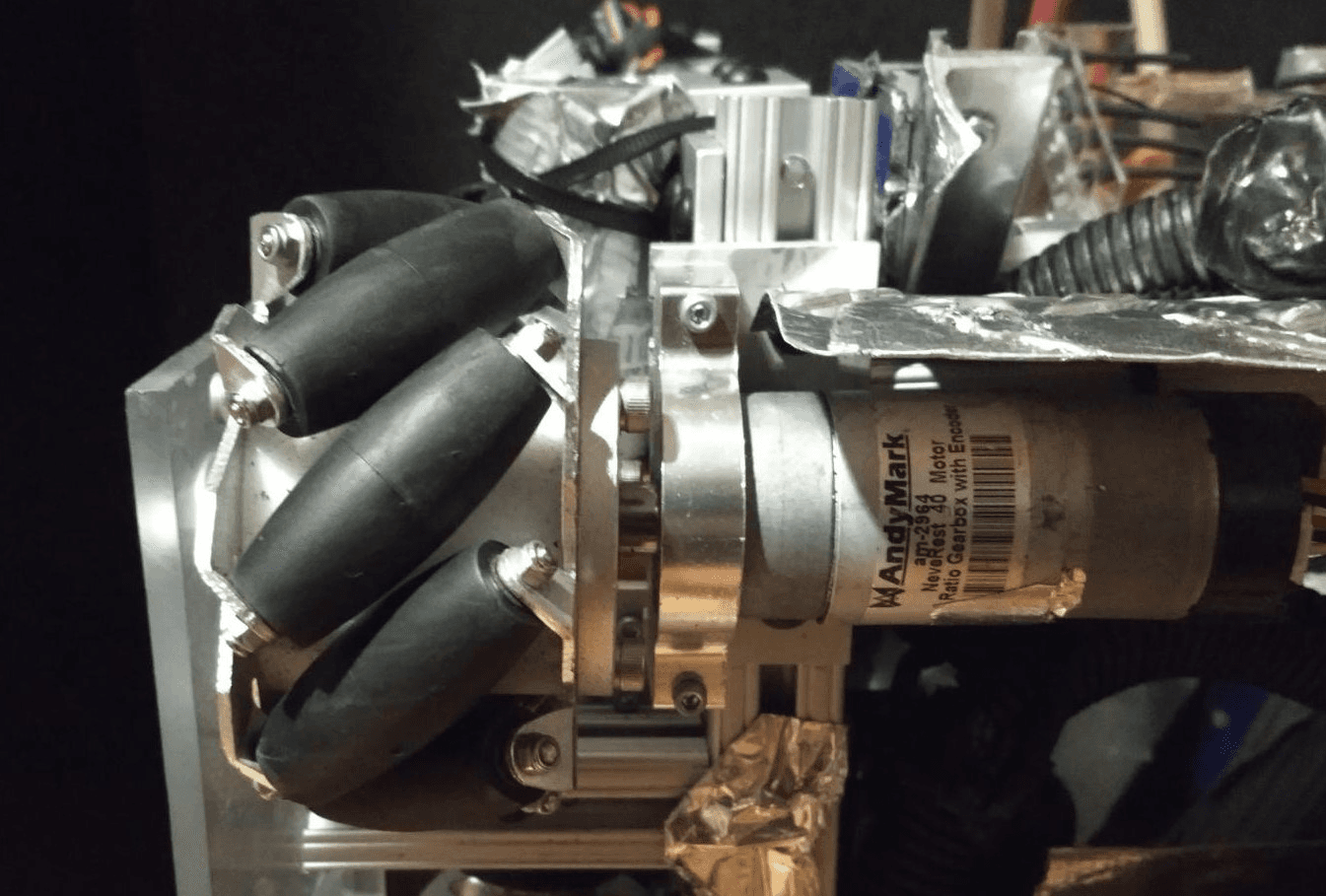
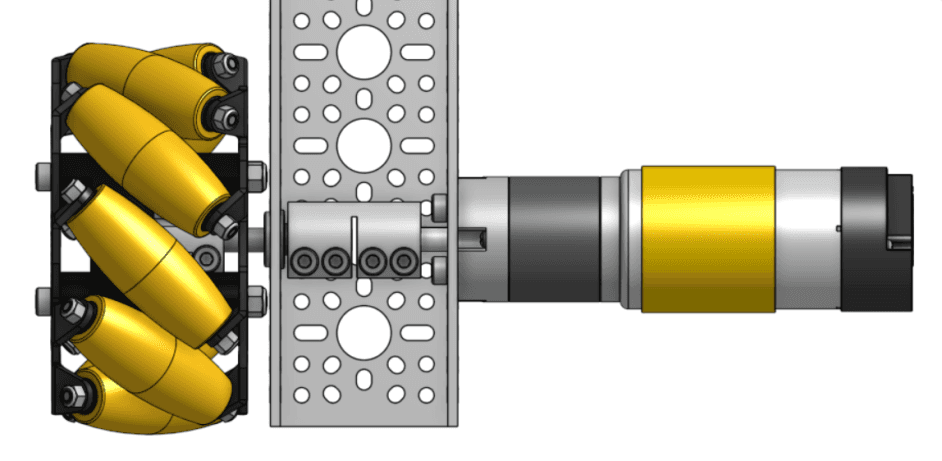
Truyền động trực tiếp là phương pháp truyền công suất cơ học (thường là đến bánh xe truyền động) trực tiếp từ trục động cơ.
Đây là cách đơn giản nhất để dẫn động, vì vậy nhiều đội mới hoặc chưa có kinh nghiệm thường chọn phương pháp này cho hệ thống truyền động (drivetrain) của mình.
Tuy nhiên, phương pháp này có nhiều nhược điểm nghiêm trọng.
Tải trọng không mong muốn lên động cơ
Truyền động trực tiếp đặt tải trọng không cần thiết lên động cơ, vì:
Tải va đập (shock load) có thể phá hủy hộp số (gearbox), kể cả loại hộp số hành tinh (planetary gearbox).
Hộp số được thiết kế để chịu tải dọc theo trục quay (axis of rotation) – ví dụ khi bánh xe đổi hướng quay, đó là tải bình thường.
Tuy nhiên, trong direct drive, trục hộp số có thể chịu các tải va đập khác ngoài trục, ví dụ khi bánh xe va chạm với robot khác hoặc tường sân đấu (việc này xảy ra thường xuyên hơn bạn nghĩ).
Hậu quả là trục động cơ có thể bị cong, hoặc hộp số bị hỏng vĩnh viễn.
Giới hạn về tỉ số truyền (Gear Ratio)
Truyền động trực tiếp chỉ sử dụng được tỉ số truyền của chính hộp số động cơ. Một ưu điểm lớn của các hệ thống truyền động khác (như dây đai, xích, bánh răng, v.v.) là bạn có thể thay đổi tỉ số truyền theo nhu cầu – tăng tốc độ hoặc tăng lực kéo.
Với Direct Drive, bạn không thể làm điều đó. Ví dụ:
Nếu hệ thống truyền động của bạn sử dụng hộp số 40:1, bạn không thể giảm nó xuống 20:1 để chạy nhanh hơn — vì trục bánh xe gắn thẳng vào động cơ.
Vấn đề chịu tải của trục động cơ
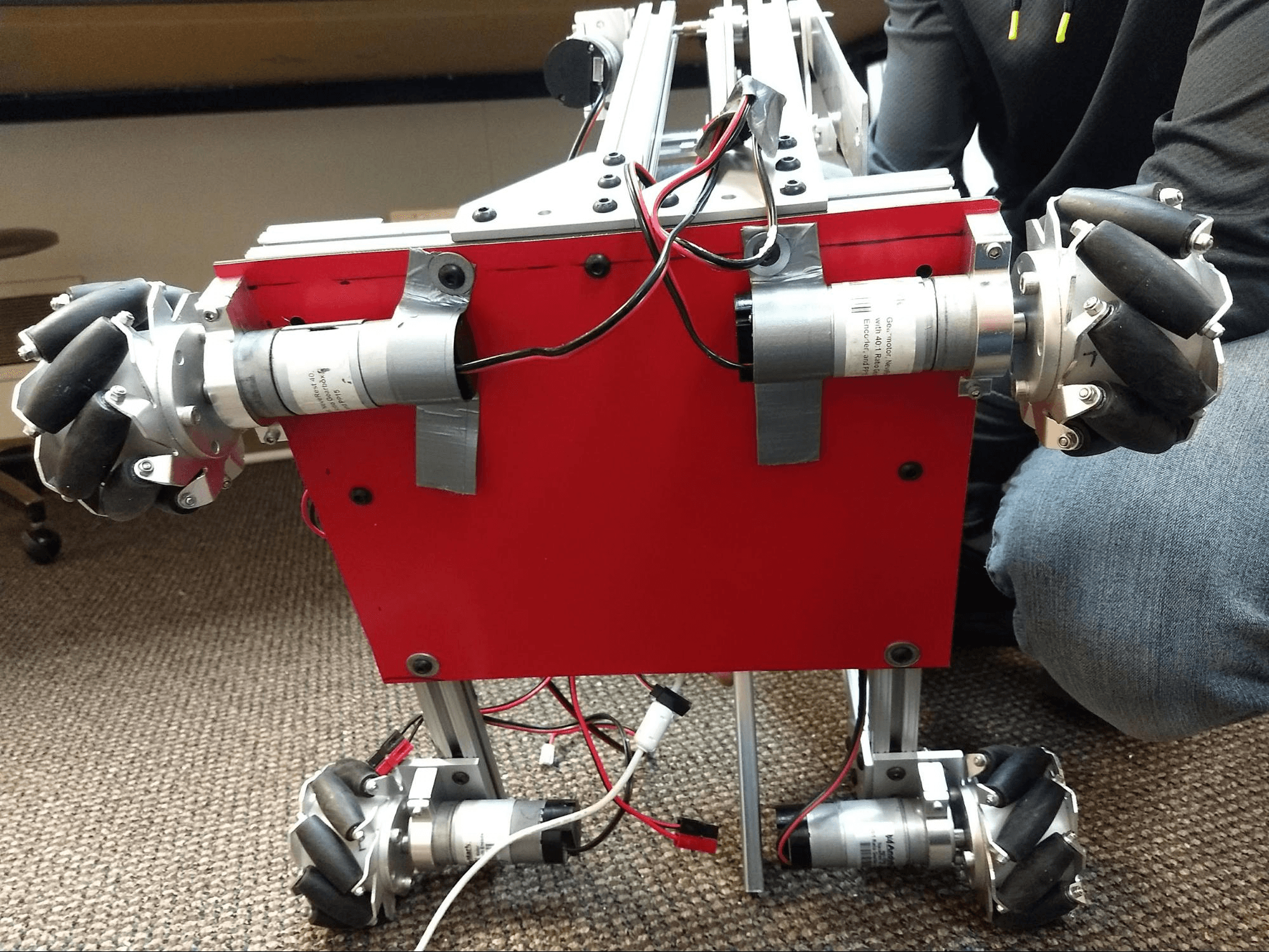
Các trục động cơ không được thiết kế để chịu tải trọng lớn hướng xuống.Điều này có thể dẫn đến cong trục động cơ, bởi vì trong truyền động trực tiếp, trục chỉ được đỡ ở một phía (phía hộp số).
Theo nguyên tắc kỹ thuật chung, mọi trục nên được đỡ ở cả hai đầu, nhưng trong Direct Drive điều này không thể thực hiện được. Điều đó dẫn đến hiện tượng “trục hẫng” (cantilevered shaft) – điều mà kỹ sư cơ khí thường cố gắng tránh.
Do đó, nếu robot nặng, trục động cơ rất dễ bị cong do thiếu điểm đỡ.
(Mặc dù thường không thể đỡ trục động cơ ở cả hai đầu, quy tắc thực hành tốt là các trục bánh xe hoặc trục phụ nên được đỡ hai bên bằng bạc đạn để tăng độ bền.)
Thuật ngữ: Trục hẫng (Cantilever)
Cantilever (trục hẫng) là khi một vật thể — thường là trục — chỉ được đỡ ở một phía. Điều này có vẻ làm giảm độ cứng kết cấu, nhưng nếu trục vẫn được đỡ tại hai điểm bằng bạc đạn hoặc bạc lót (bushing), thì thiết kế hẫng vẫn chấp nhận được.
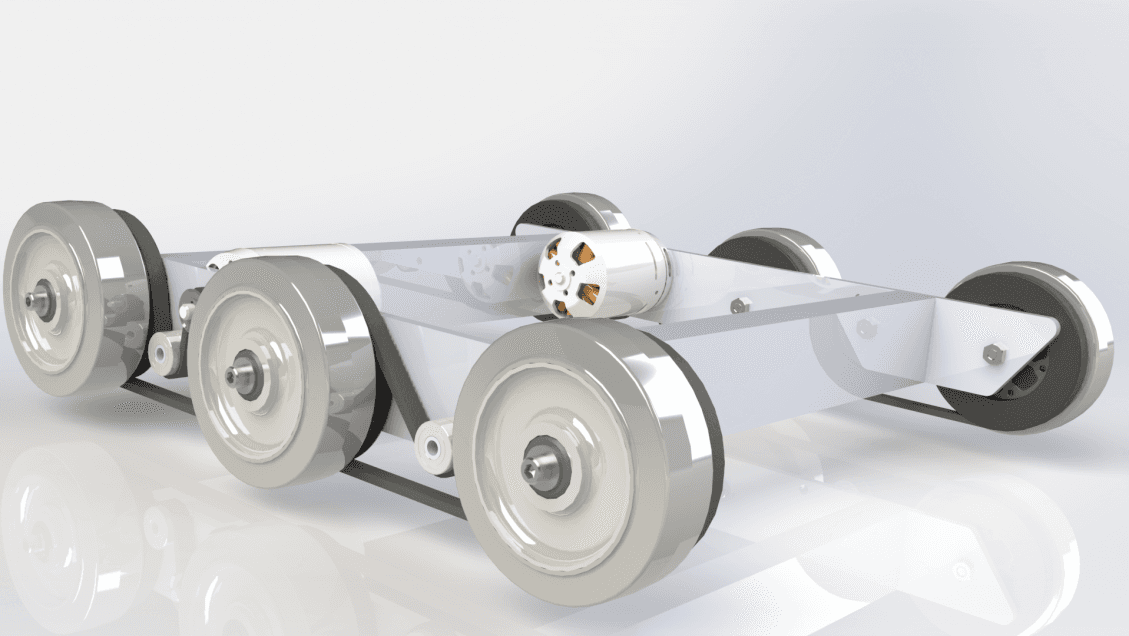
Nhiều hệ thống truyền động (drivetrain) trong robot được thiết kế dạng trục hẫng, giúp dễ dàng tháo/lắp bánh xe.
Việc đỡ trục ở cả hai bên là lý tưởng nhất về mặt kết cấu, nhưng trong hầu hết trường hợp thực tế, sự khác biệt không quá đáng kể.
(Ví dụ: Mẫu thử hệ thống 6 bánh xe hẫng của Sanford – “Sanford’s Cantilever 6WD Prototype” là minh chứng cho kiểu thiết kế này.)
Ưu điểm
Tiết kiệm không gian.
Dễ chế tạo – là hình thức truyền động đơn giản nhất.
Nhược điểm
Dễ bị tải va đập, có thể phá hỏng hộp số.
Giới hạn tỉ số truyền (phụ thuộc hoàn toàn vào hộp số động cơ).
Làm hao mòn hộp số nhanh hơn.
Có thể làm cong trục động cơ.