Design trade off
Định nghĩa: design trade off về cơ bản chính là so sánh ưu nhược của từng cơ cấu, từ đó gắn chúng với điều kiện sử dụng để đưa ra phương án tối ưu
Ví dụ, ta có bảng so sánh dưới đây:
Vấn đề | Giải pháp |
Drivetrain dùng 2 động cơ sẽ yếu điện dẫn đến gia tốc chậm | Sử dụng drive 4 động cơ, cho nguồn điện lớn hơn , tốc độ cao hơn |
Pushbot ( 1 con bot chỉ có thể di chuyển sử dụng drivetrain 2 động cơ) kém linh hoạt và tính đa dụng | Sử dụng các loại drivetrain khác, các loại bánh xe khác giúp cải thiện tốc độ, độ bám,.... cũng như nhiều tính năng khác |
Sử dụng cơ cấu Claw - chính xác nhưng dễ hỏng và gần như chỉ có thể điều khiển 1 element 1 lúc | Sử dụng cơ cấu intake khác (roll wheel,...) đem lại khả năng thu thập nhiều element hơn |
Bánh răng - chịu tải kém | Sử dụng bánh răng hành tinh, cải thiện tải trọng, khó hỏng hơn khi gia tốc cao |
Thiết kế cánh tay đơn/đa trục -> phức tạp cả công đoạn chế tạo và điều khiển | Sử dụng thiết kế Linear ( chuyển động thẳng trượt trên nhau) cho tốc độ và tính khả thi cao hơn |
Drivetrain
Tổng quan:
Drivetrain là phần quan trọng nhất của 1 robot, là cơ cấu đầu tiên cần được tính đến
Drivetrain chịu trách nhiệm cho khả năng di chuyển của robot, và nếu robot không thể di chuyển, đồng nghĩa với vô dụng
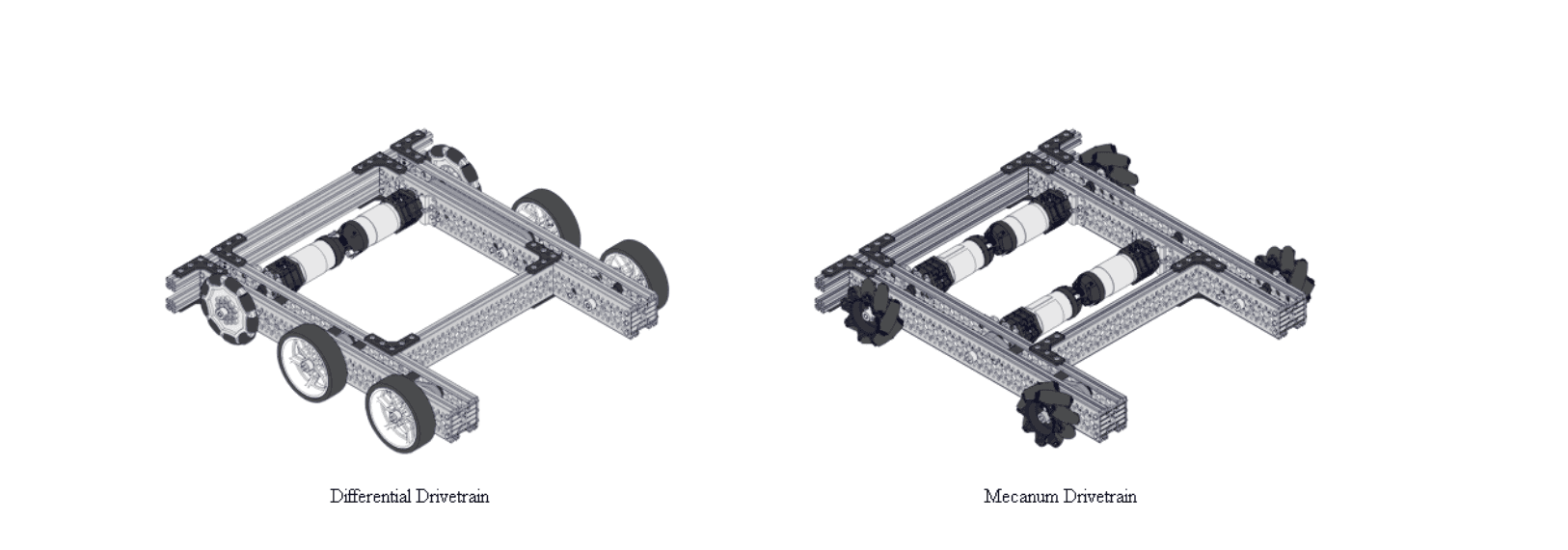
Drivetrain được chia làm 2 loại chính : Tank và Holonomic
Tank drive:
thường chỉ dùng bánh traction và grip
sử dụng nguyên lí momen lực để đổi hướng di chuyển
không thể đi ngang
có tính bám ,khả năng tăng tốc, chắc chắn
Holonomic:
có thể đi ngang
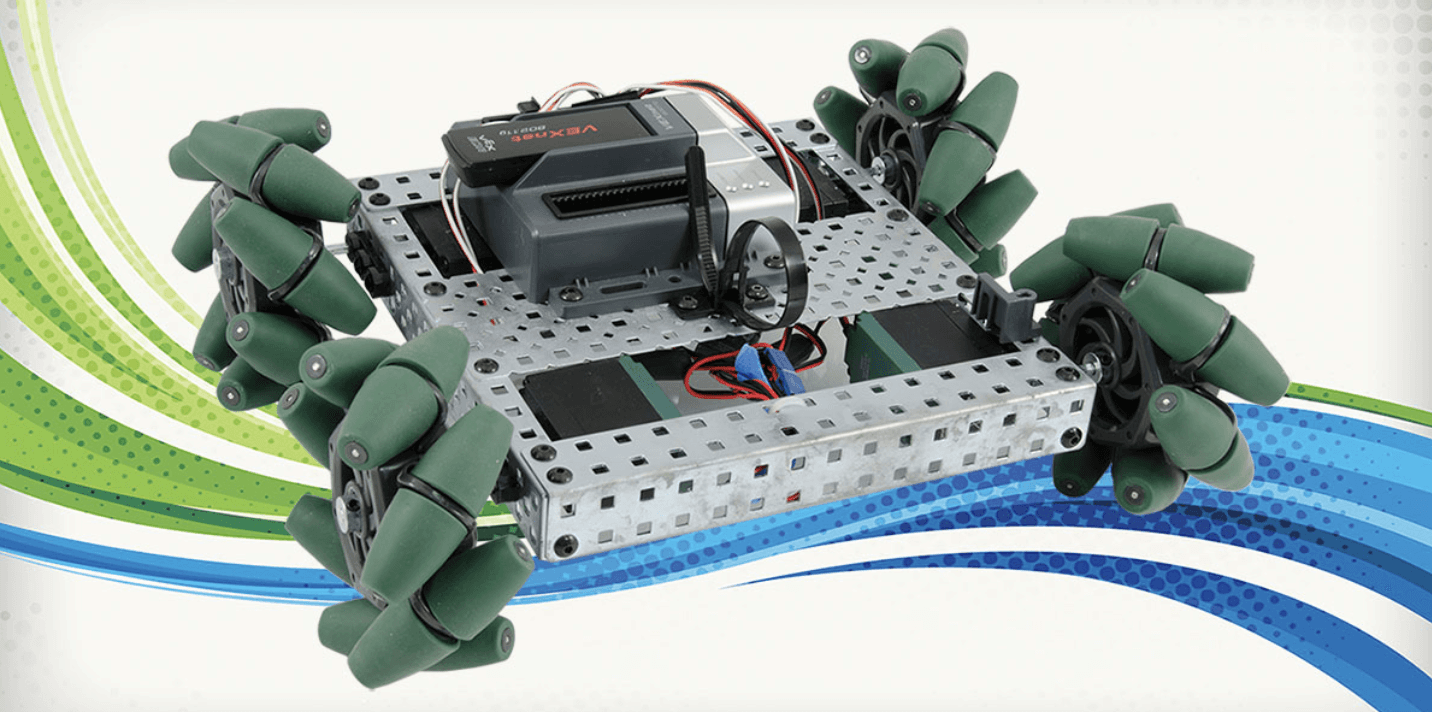
dùng bánh đa hướng (omni, mecanum)
có thể kém hiệu quả khi chịu tải nặng
Kết luận:
Chọn thiết kế drivetrain nào nên được xem xét thông qua các yếu tố như tính ổn định, cơ động, nguyên liệu cần thiết , và năng lượng , cân nhắc mục đích sử dụng và điều kiện thực hiện để đưa ra lựa chọn tối ưu nhất
VD : cần leo dốc, vượt địa hình … thì dùng tank drive còn cần khả năng cơ động thì dùng holonomic drive
Hình ảnh thực tế: