Thuật Ngữ
Dead Wheel
Một bánh xe nhỏ không được cấp nguồn (thường là omni wheel) dùng để theo dõi khoảng cách robot đã đi thông qua encoder gắn trên trục bánh xe.
Thông thường, sẽ có hai hoặc ba bánh xe – một hoặc hai bánh trên trục x và y để theo dõi vị trí tiến-lùi và trái-phải so với điểm xuất phát. Nói chung, các bánh xe odometry được gắn lò xo (sprung) để bánh xe luôn tiếp xúc với mặt sàn nhằm đảm bảo độ chính xác.
Odometry là việc sử dụng cảm biến chuyển động cho mục đích xác định vị trí (localization). Localization là phương pháp để biết vị trí của robot tại một thời điểm nhất định. Localization cực kỳ quan trọng trong việc theo dõi đường đi và chế độ tự động nâng cao, vì cần biết vị trí hiện tại để tạo ra các chuyển động cần thiết để đạt đến đích mong muốn. Phần mềm định vị đóng vai trò quan trọng trong odometry; tuy nhiên, để cho kết quả chính xác, cần thiết kế phần cứng đáng tin cậy và chính xác.
Hình thức đơn giản nhất của odometry là drive encoder localization. Đây là việc sử dụng encoder để đo vòng quay của động cơ cung cấp năng lượng cho drive train. Người dùng có thể đọc dữ liệu encoder và đưa vào phương trình động học (kinematic equation) của drive train cụ thể để suy ra vận tốc của thân robot. Drive encoder localization khá đơn giản và dễ cài đặt vì hầu hết các động cơ hợp pháp trong FTC đều có encoder tích hợp. Việc cài đặt drive encoder localization chỉ đơn giản là cắm dây, không cần phần cứng bổ sung.
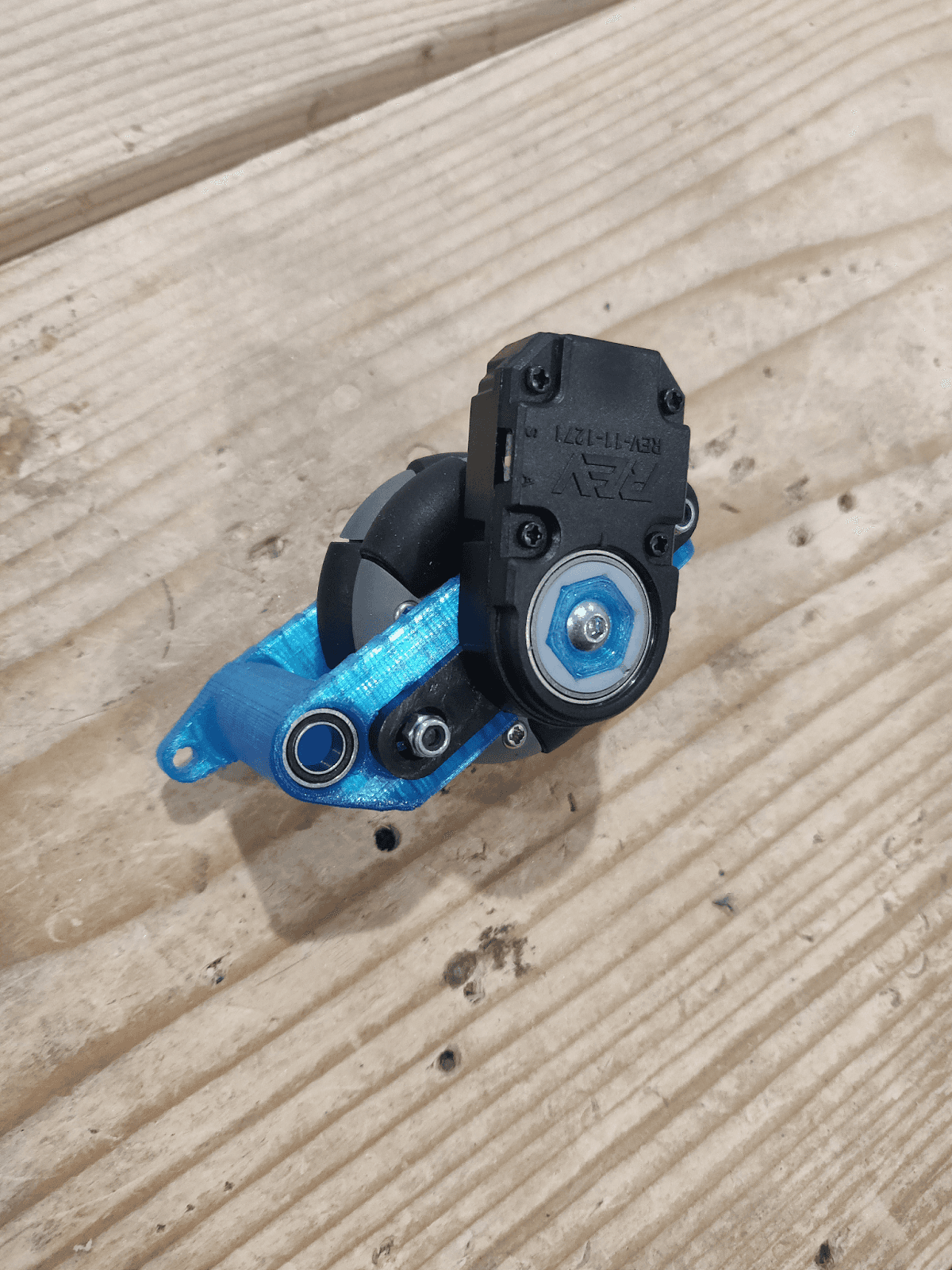
Nhiều đội trong cộng đồng đã tìm ra một giải pháp độc đáo hiếm thấy ngoài FTC: sử dụng “dead wheels,” “tracking wheels,” hoặc “odometry pods” (các thuật ngữ này đều đồng nghĩa). Chúng là các bánh xe nhỏ “chết” hoặc không được dẫn động (non-driven, không được cấp nguồn bởi động cơ) gắn với cảm biến encoder. Hai hoặc ba pod dead wheel thường được gắn lò xo xuống đất để đảm bảo theo dõi chính xác. Thiết kế hai bánh sử dụng một pod song song và một pod vuông góc (song song và vuông góc so với trục bánh xe), đo chuyển động x và y tương ứng. Thay đổi hướng (heading) được đo bằng gyroscope. Thiết kế ba bánh sử dụng hai pod song song và một pod vuông góc, đo chuyển động x và y tương ứng, nhưng bỏ qua gyroscope và đo hướng dựa trên sự khác biệt giữa hai bánh song song. Thiết kế này thường chính xác hơn trong hệ thống điều khiển FTC, vì BNO055 IMU (dùng cho gyroscope trong thiết kế hai bánh) sử dụng I2C, chậm hơn các cổng I/O khác trên REV Hub và không thể đọc hàng loạt (bulk read). Hai vấn đề này dẫn đến sai số nhỏ có thể cộng dồn theo thời gian, dẫn đến hệ thống định vị kém chính xác hơn khi sử dụng thiết kế hai bánh.
Tuy nhiên, thiết kế dead wheels chính xác liên tục là một thách thức. Nó thường khá tốn kém. Một bộ ba bánh dead wheel sẽ tốn ít nhất 100 USD chỉ riêng cho encoder, chưa tính phần cứng khác.
Ưu và Nhược Điểm của Các Hệ Thống
Drive Encoder Localization
Ưu điểm:
Rẻ (động cơ bạn sử dụng thường đã có encoder tích hợp)
Dễ tiếp cận
Cấu hình rất ít
Nhược điểm:
Trên mecanum drive, độ chính xác kém do thiếu ma sát
Sẽ bị lệch khi gia tốc cao. Độ chính xác đủ cho chế độ tự động cơ bản nếu gia tốc bị giới hạn
Two-Wheel Odometry Pods
Ưu điểm:
Rẻ hơn thiết kế 3 bánh
Độ chính xác khá tốt
Không cần tinh chỉnh hướng (heading)
Nhược điểm:
Dễ bị lệch hơn thiết kế 3 bánh
Three-Wheel Odometry Pods
Ưu điểm:
Theo dõi khá chính xác. Độ chính xác cao trong chế độ tự động 30 giây
Nhược điểm:
Khá tốn kém
Cần tinh chỉnh hướng (heading) rất quan trọng
Encoders
Phần lớn việc định vị bằng phần mềm dựa vào dữ liệu từ encoders. Encoders là cảm biến theo dõi “counts” hoặc “ticks”, là giá trị đại diện cho một lượng quay nhất định. Các encoder khác nhau có thể có số lượng counts per revolution (CPR) khác nhau, đôi khi gọi là ticks per revolution. Số lượng counts càng lớn, dữ liệu càng chính xác.
Encoders được cắm vào cổng JST-PH trên REV Hub. Chúng có thể tích hợp trong động cơ hoặc là ngoại vi. Encoders ngoại vi vẫn cần cắm vào cổng encoder nhưng không liên quan đến động cơ ở cổng đó. Phần mềm có thể sử dụng motor object để xác định vị trí của encoder. Điều này nên thực hiện với động cơ không dùng encoder. Nếu sử dụng dead wheels, bạn sẽ không cần cổng encoder động cơ, nên đây là các cổng tiềm năng để dùng.
Nếu thiết kế dead wheels, chỉ có hai encoder được khuyên dùng trong FTC: REV Through-Bore Encoders và U.S. Digital S4T Encoders.
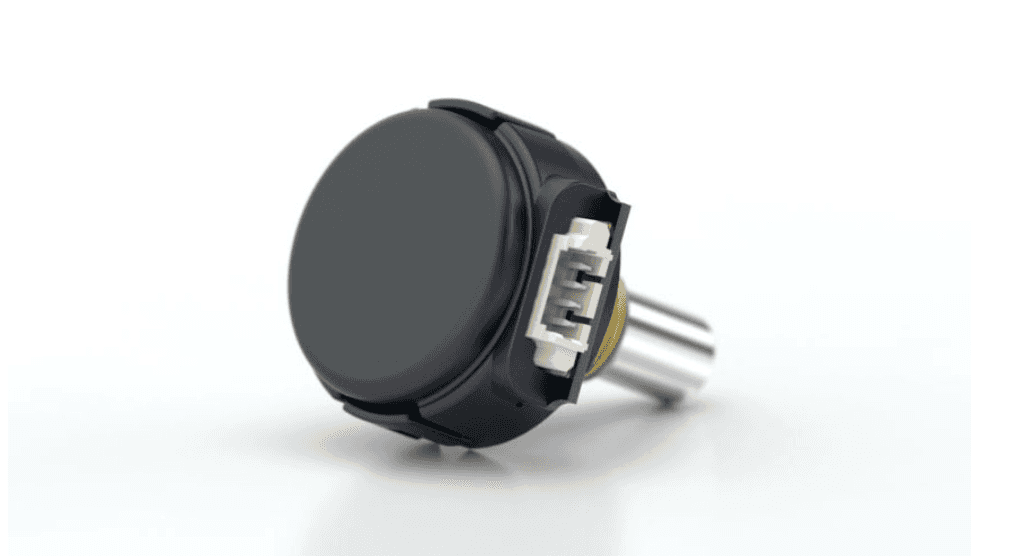
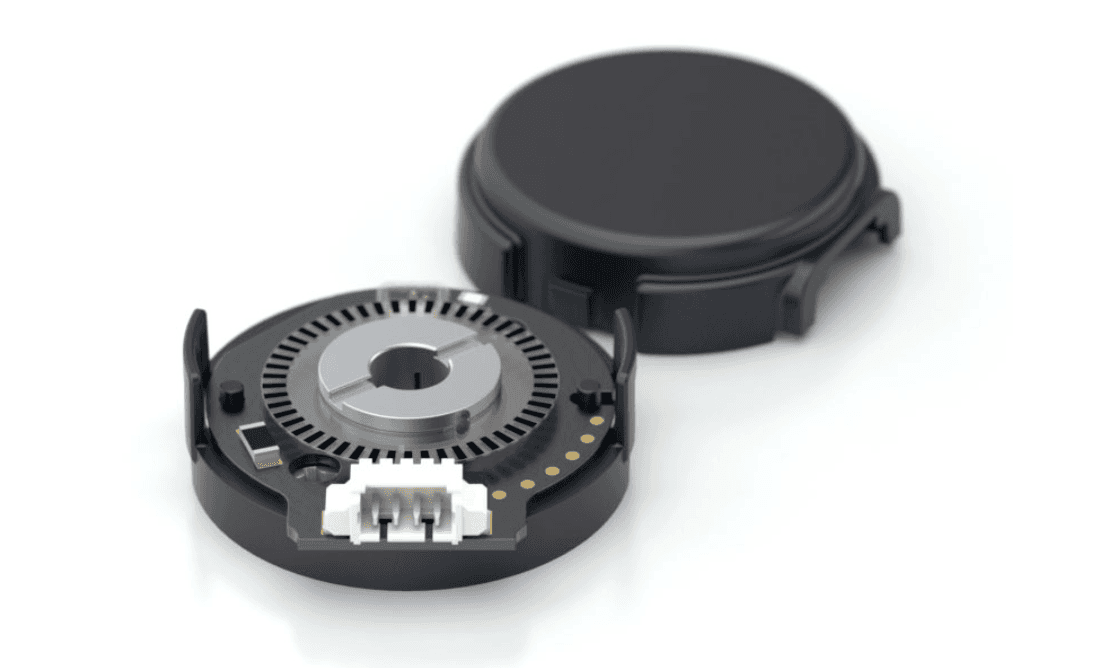
REV Through-Bore

Thường gọi tắt là REVcoders hoặc revcoders, REV Through-Bore encoder nhanh chóng trở thành lựa chọn phổ biến trong cộng đồng FTC nhờ giá thành hợp lý, độ tin cậy cao và dễ sử dụng. Thiết kế through-bore là cải tiến lớn so với các encoder đĩa quang trước đó, vốn dễ hỏng, dễ trầy xước, và kém chịu lỗi thiết kế.
Ưu điểm:
Thiết kế through-bore bền, dễ thiết kế
Giá khá rẻ
CPR cao
Dễ đi dây
Nhược điểm:
Kích thước lớn so với encoder khác, khó tạo thiết kế nhỏ gọn
Một số Through-Bore gặp lực cản không đều khi quay, REV nói là bình thường và sẽ giảm khi encoder “mài mòn”
Điểm gắn lạ
Ghi chú:
Through-Bore encoder có CPR cao (8k). REV Hub truyền vận tốc dưới dạng số nguyên 16-bit. Nghĩa là giá trị tối đa là 2^15 = 32768. Chỉ cần 4 vòng quay/giây (32k / 8k = 4) là giá trị vận tốc sẽ tràn số nguyên. Vấn đề này chủ yếu quan trọng khi dùng motion profiling, nhưng các công cụ phổ biến như Road Runner và FTCLib đã có cơ chế xử lý, không cần lo.
U.S. Digital S4T
Encoder trục nhỏ (miniature shaft encoder) này là lựa chọn khác cho dead wheel. Kích thước nhỏ giúp giảm footprint của thiết kế dead wheel. Nên dùng bánh răng (gearing) để tránh sốc cơ học.
Ưu điểm:
Rất nhỏ gọn
Nhược điểm:
Giá cao (gấp gần 2 lần)
Độ bền kém
Dây mảnh, dễ gãy nếu không cố định
Cần bánh răng bên ngoài
SRX Mag Encoder
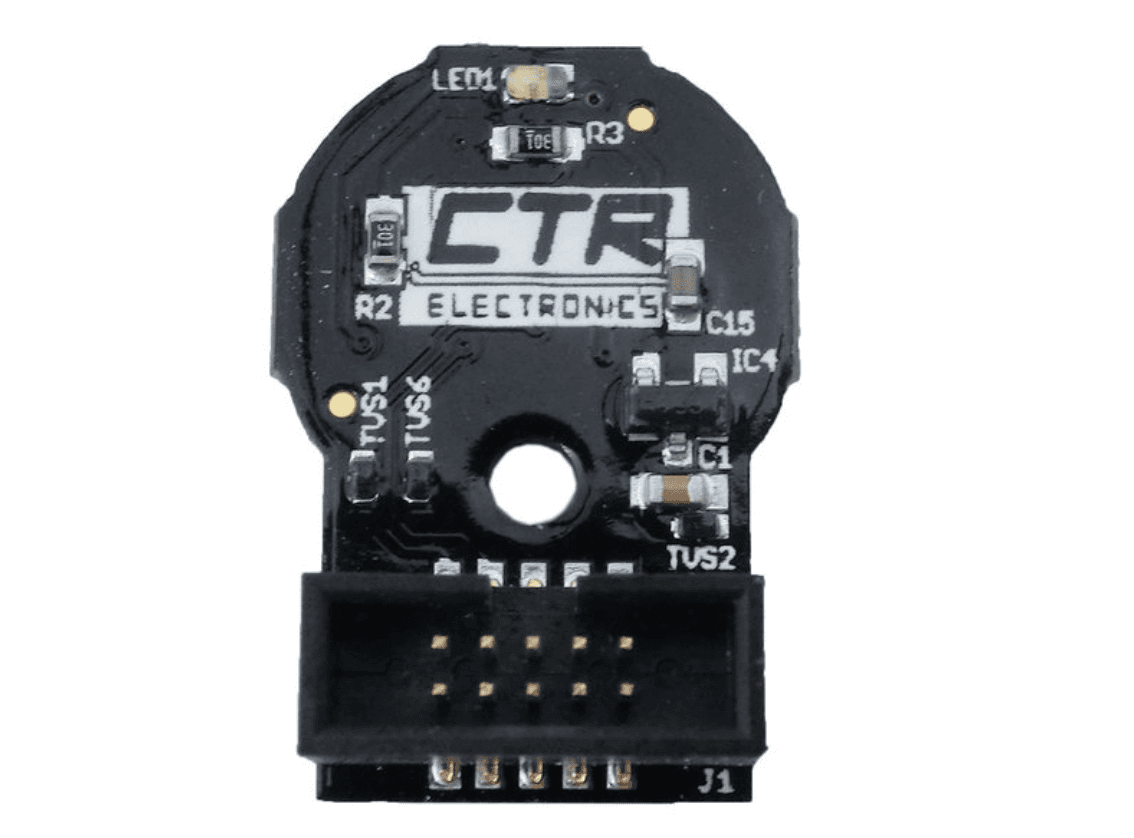
Encoder từ tính, ít được FTC dùng do phức tạp hơn và thiếu tài liệu, phổ biến hơn ở FRC®.
Ưu điểm:
Rất nhỏ gọn
Giá tương đối rẻ
Nhược điểm:
Cần lắp ráp
Ít thông tin cho FTC
U.S. Digital E8T (không còn dùng)
Trước đây là lựa chọn phổ biến, nhưng không còn được khuyến nghị do REV Through-Bores tốt hơn với giá tương đương. Thiết kế mở của E8T dễ hỏng, dễ gãy. Chỉ lợi thế là footprint nhỏ hơn.
Thiết Kế
Ít thiết kế dead wheel mã nguồn mở. Thường được thiết kế quanh drive train riêng của đội, hiếm khi công khai CAD robot.
Một số thiết kế công khai:
Open Odometry by 18219
https://openodometry.weebly.com
Sử dụng REV Through-Bore Encoder, phổ biến, bền, vừa khít kênh goBILDAgoREVdometry
https://discord.com/invite/Cvz3MbM9dX
Sử dụng REV Through-Bore Encoder, vừa khít kênh goBILDA, thông tin qua Discord9794 Wizards.exe Design
YouTube
Vừa khít kênh goBILDA, không còn khuyến nghị vì dùng E8T
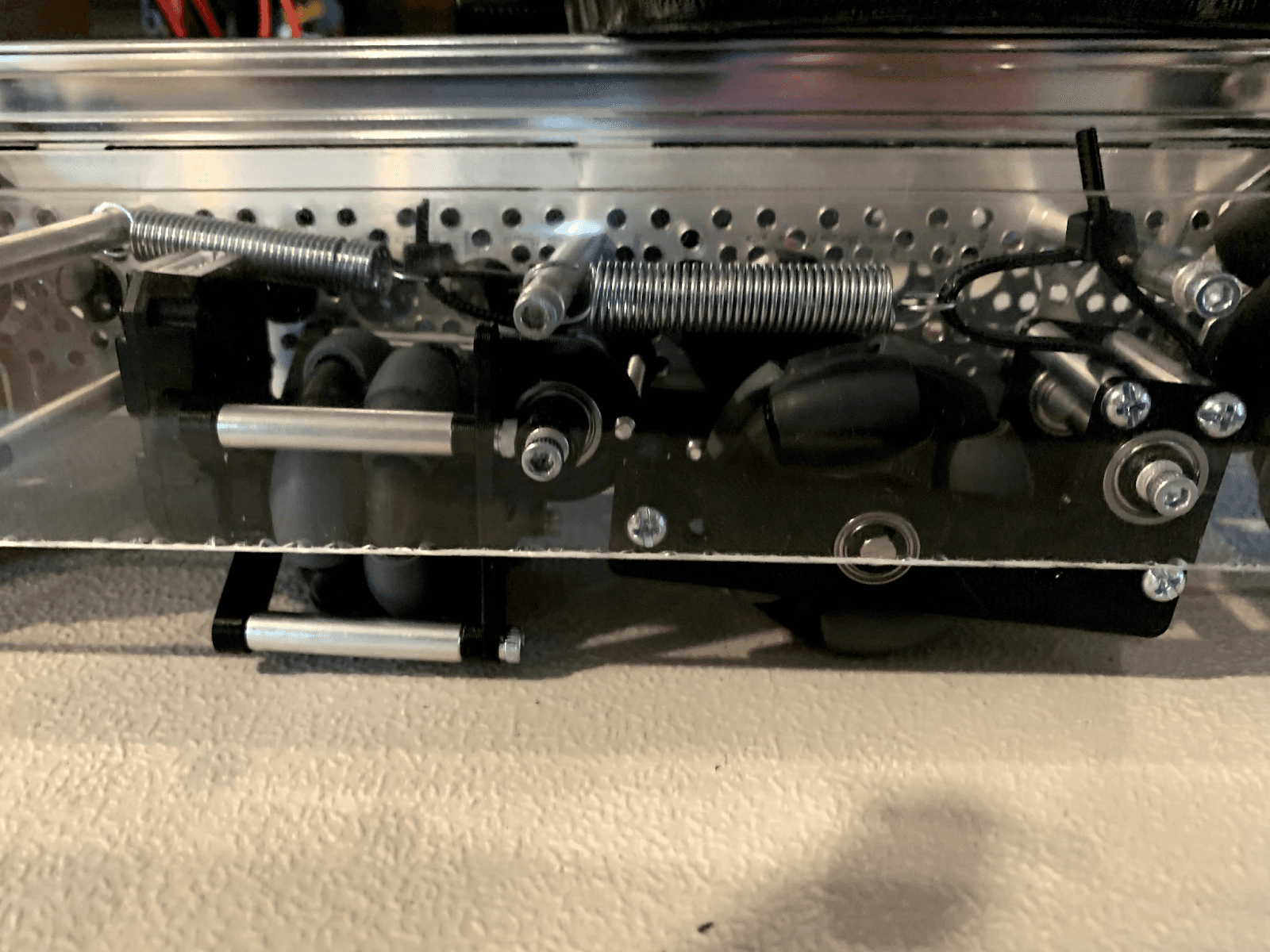
Lò Xo Gắn Bánh Xe (Spring Tensioning)
Khuyến nghị sử dụng cơ chế lò xo đẩy bánh xuống sàn để bánh luôn tiếp xúc, đảm bảo ma sát. Lực vừa đủ, quá mạnh có thể nâng drive train nhẹ khỏi mặt đất, ảnh hưởng lái.
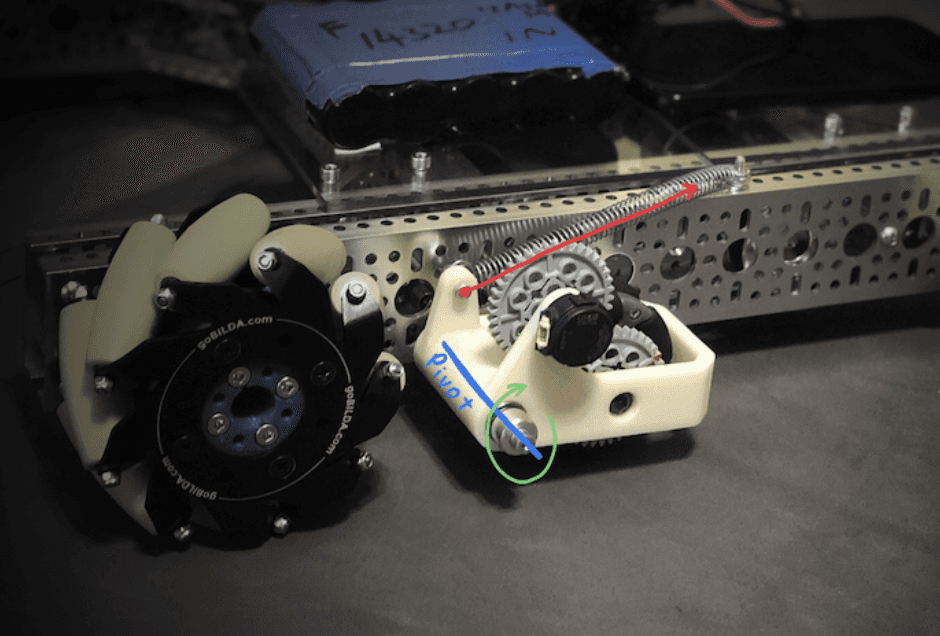
Phổ biến: pivot pod quanh điểm cố định, dùng lò xo hoặc dây cao su tạo lực quay.
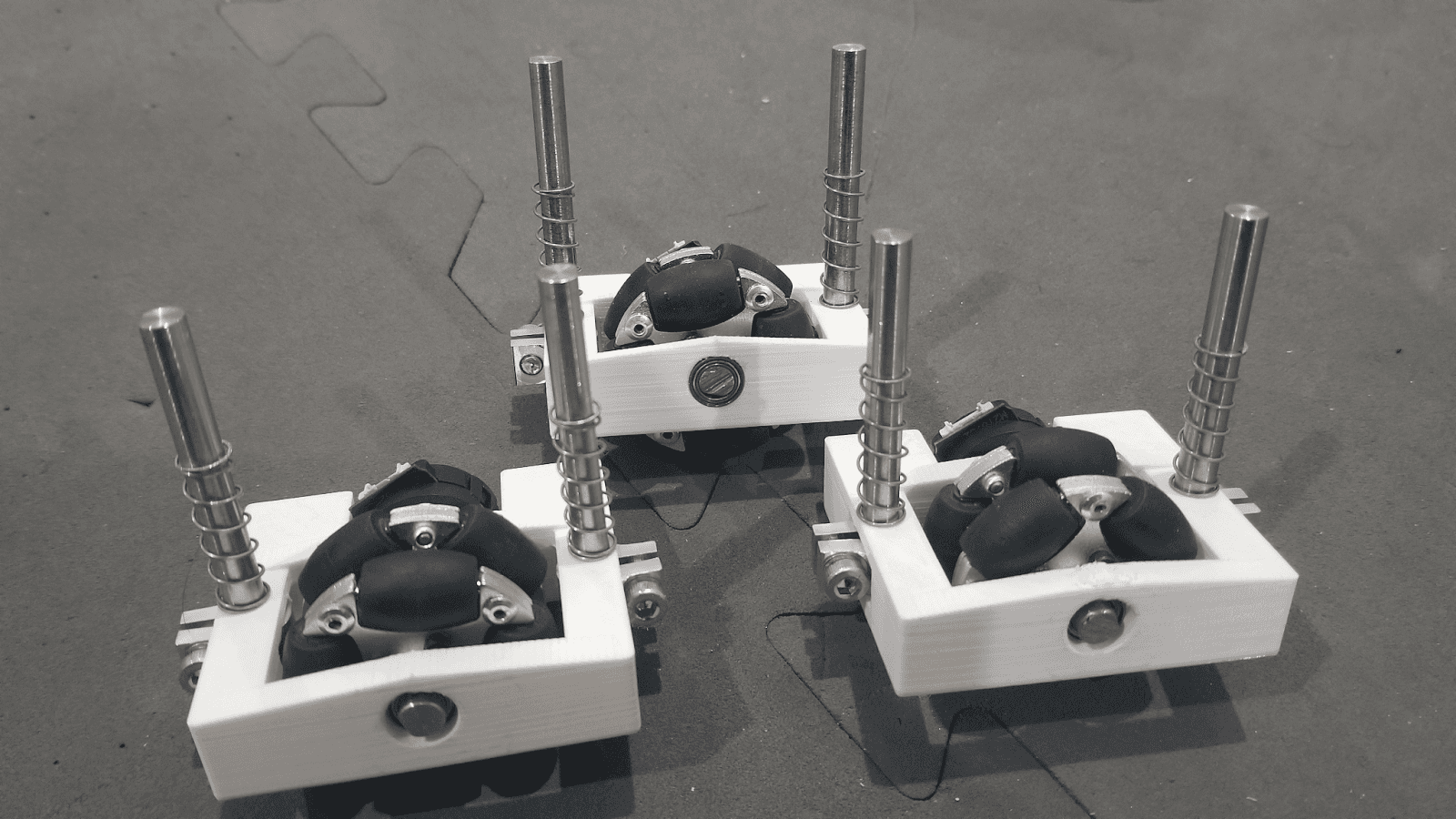
Tùy chọn hiếm hơn: lò xo theo phương thẳng đứng, nhưng khó thiết kế và cải thiện độ chính xác không nhiều.
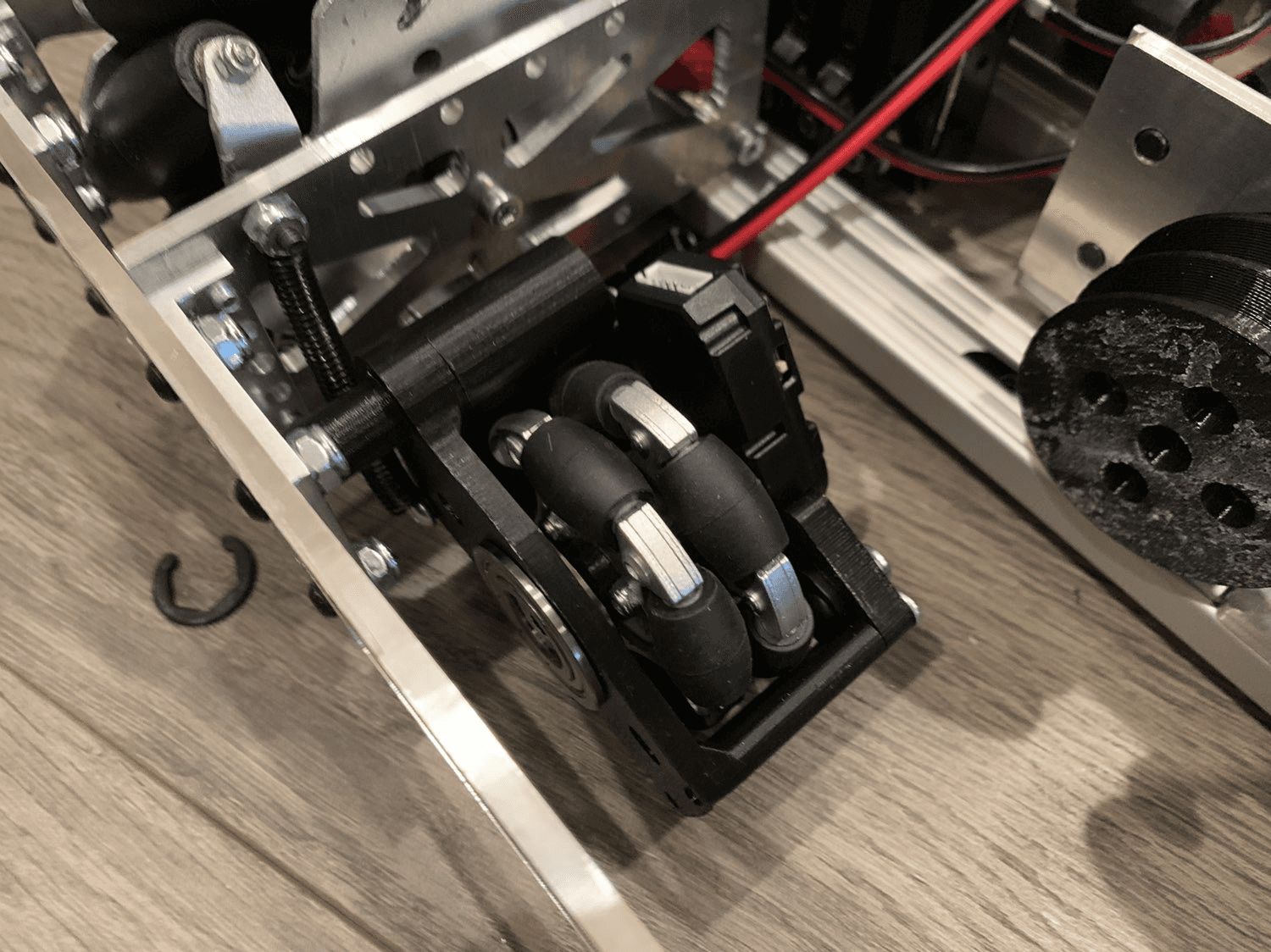
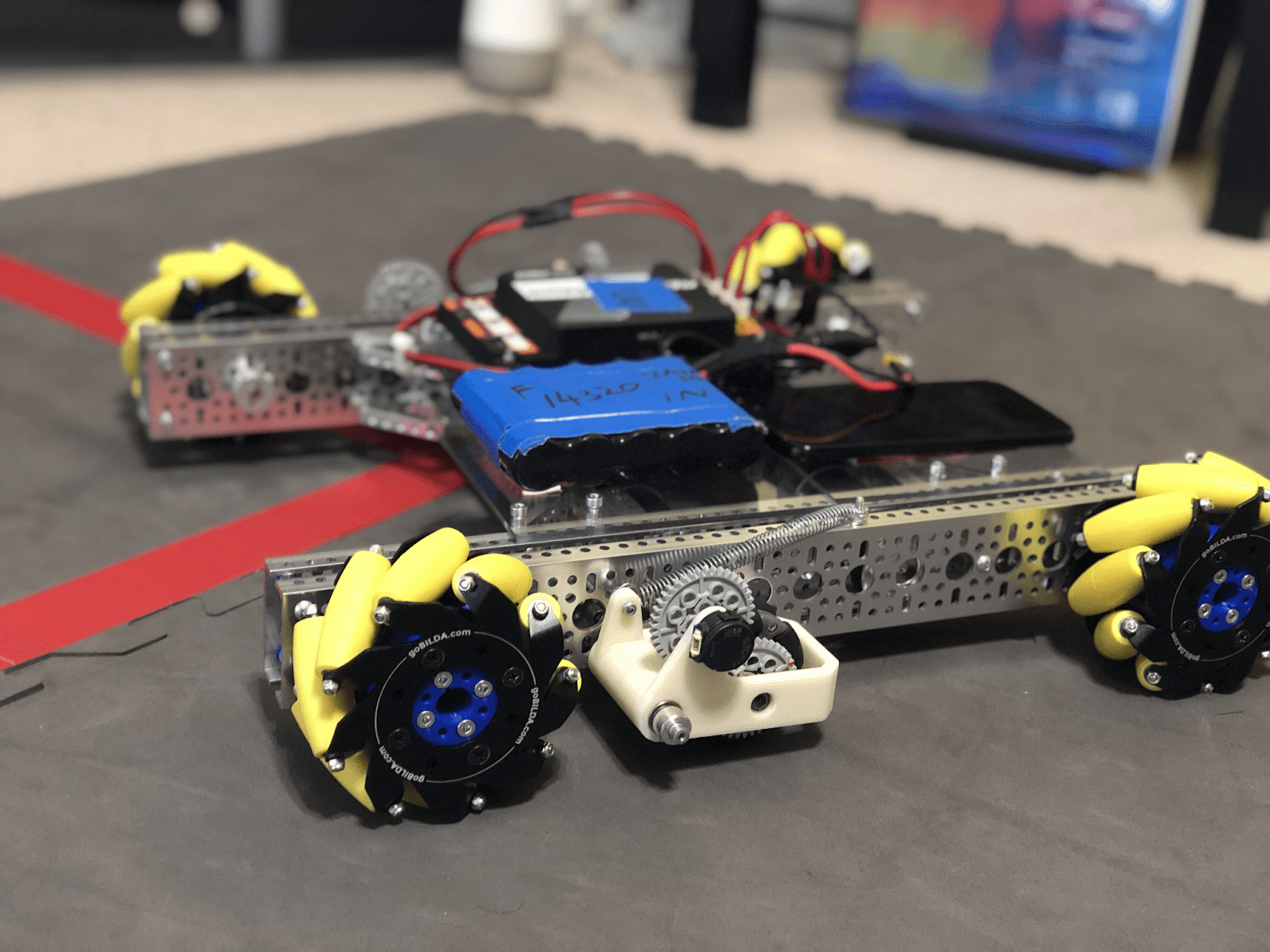
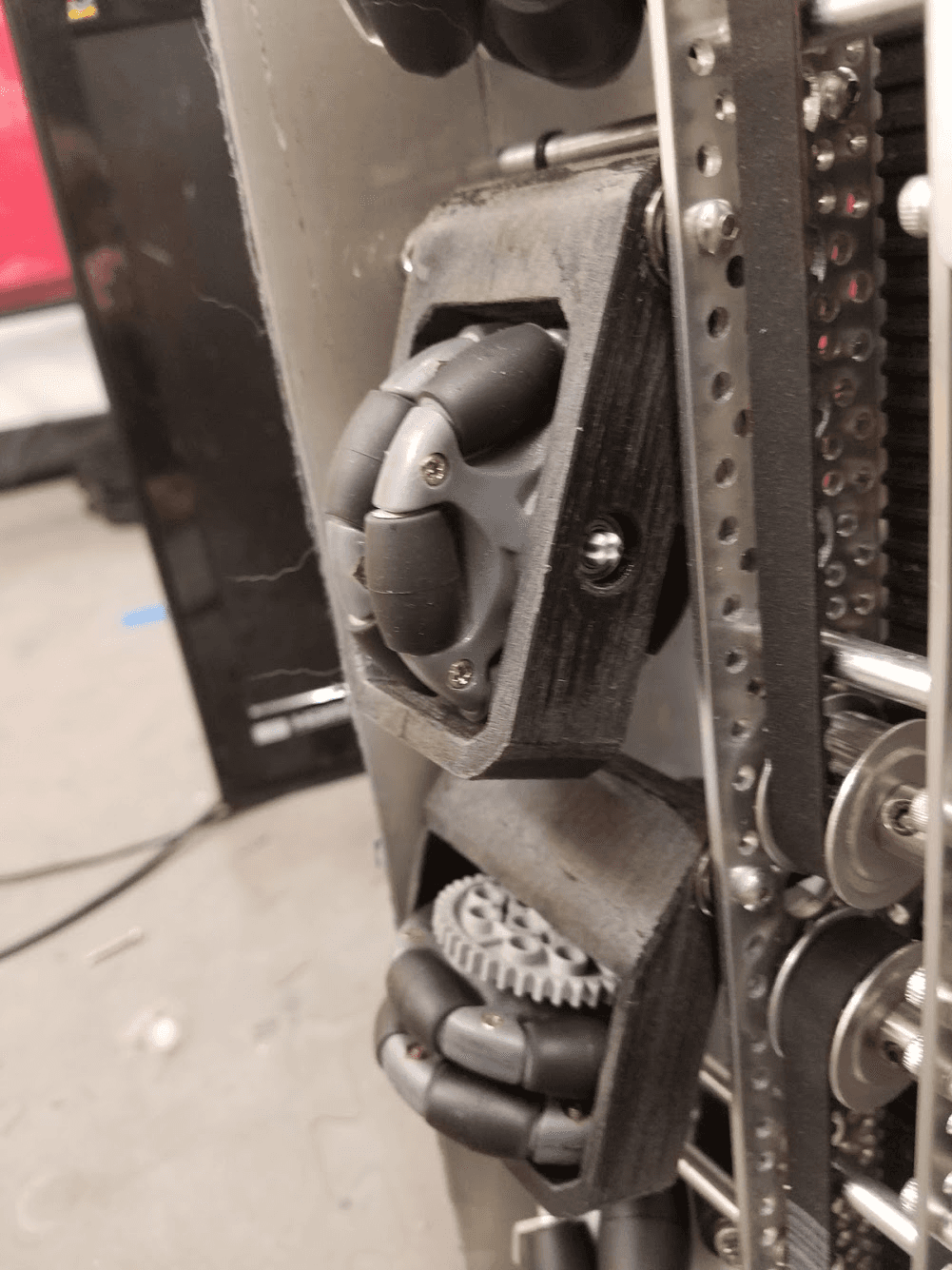
Thư Viện Hình Ảnh (Gallery)
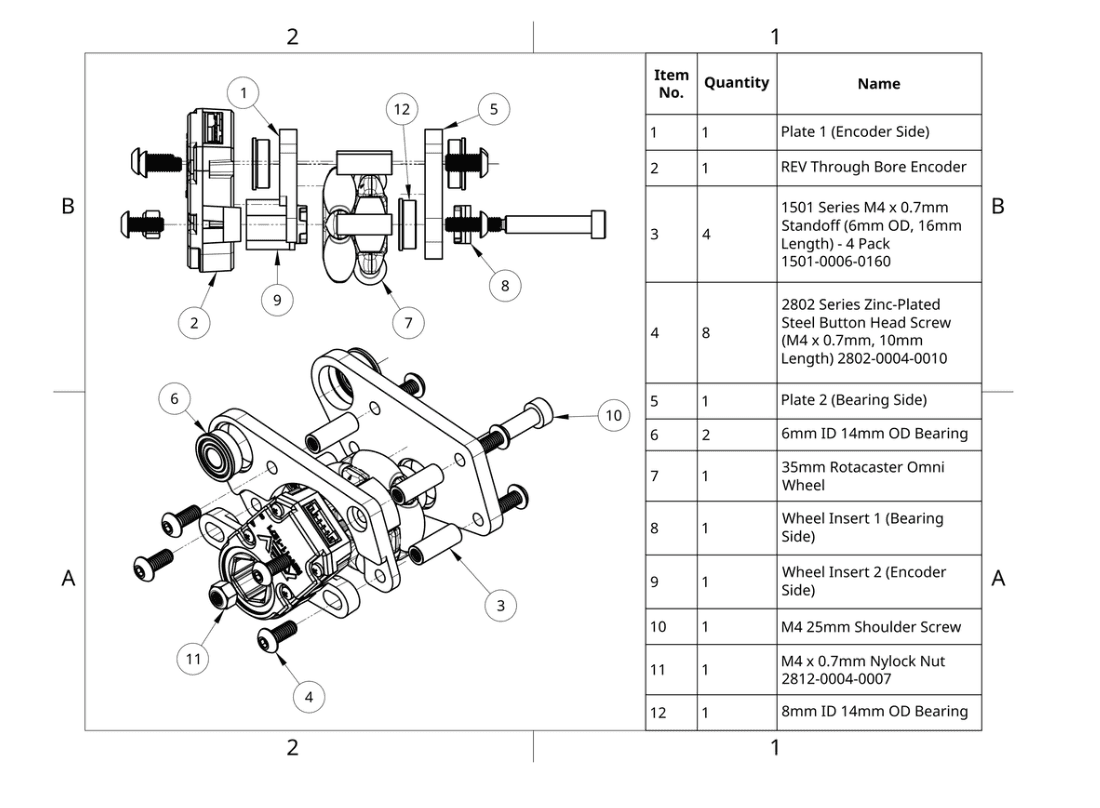
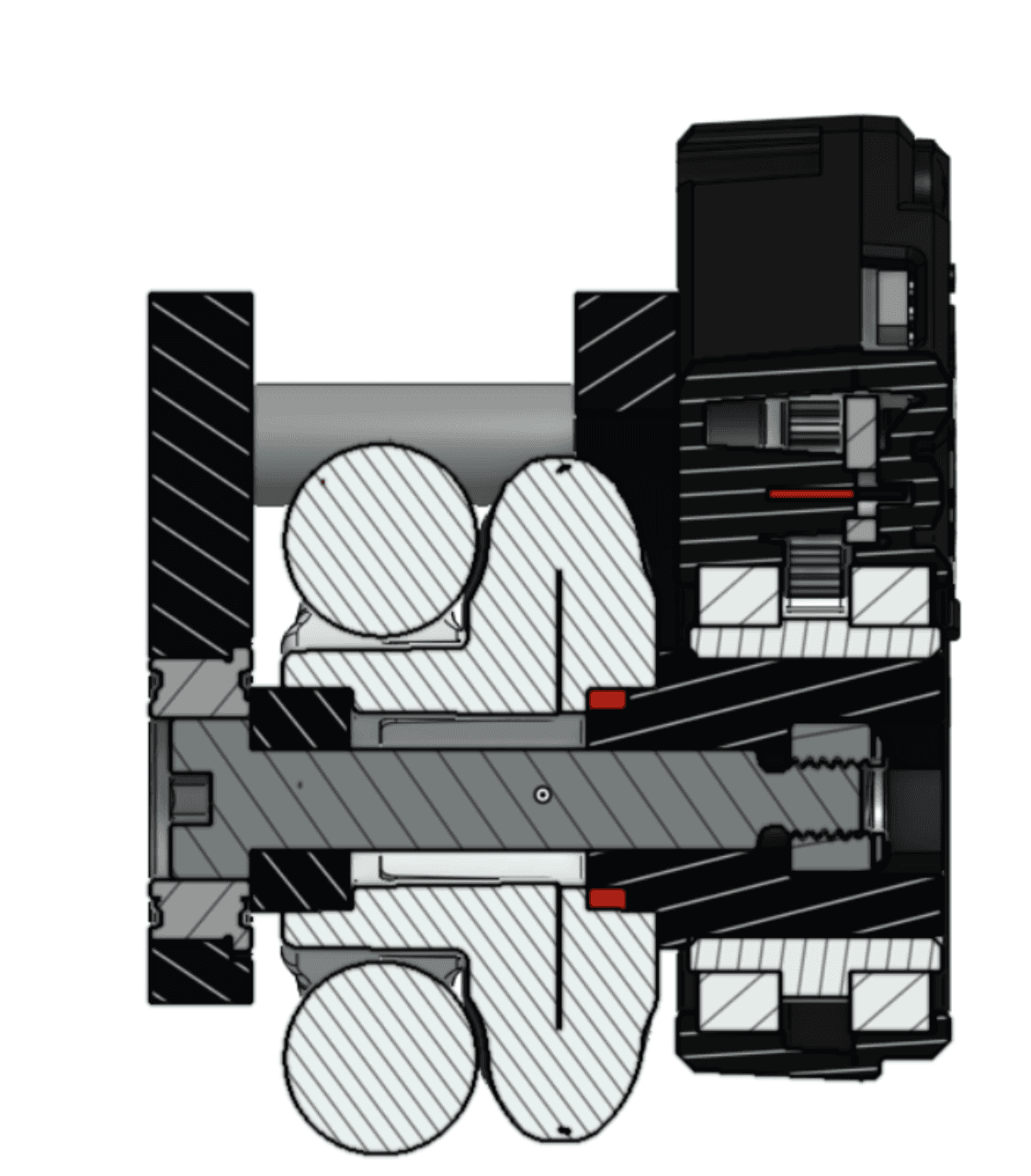
Open Odometry (REV Through Bore Encoder): Bản vẽ exploded, sectional view
FTC® Team 14310 (REV Through Bore Encoder)
FTC Team 8802 (REV Through Bore Encoder)
FTC Team 14320 (US Digital S4T)
FTC Team 11115 (US Digital S4T)
FTC Team 14481 (REV Through Bore Encoder)
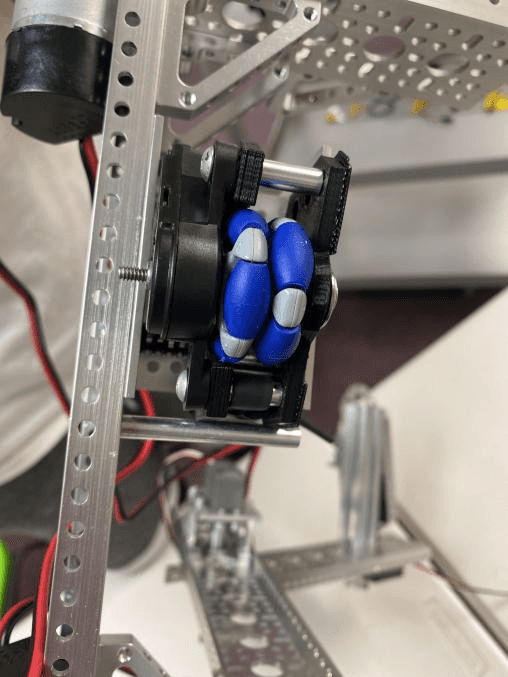
FTC Team 3658 (REV Through Bore Encoder)
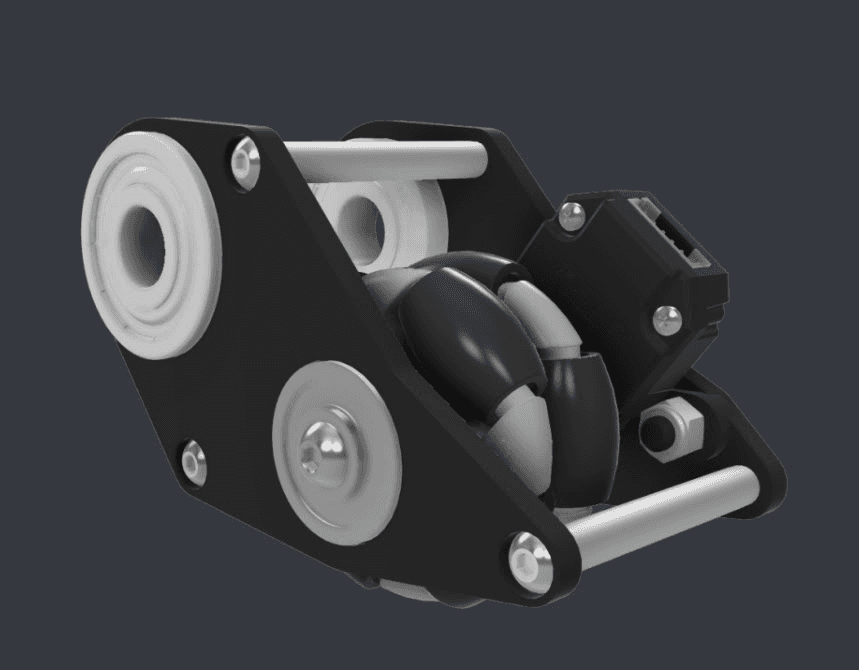
FTC Team 7236 (REV Through Bore Encoder)