


Mỗi năm tại VEX Robotics World Championship (Giải vô địch Robotic Thế giới của VEX), trò chơi VEX IQ Challenge cho năm tiếp theo được phát hành. Bên cạnh đó, ở các lớp học khắp thế giới hàng trăm trò chơi sáng tạo được phát triển mỗi ngày. Những trò chơi này có các game piece (mảnh trò chơi) với nhiều hình dạng, kích thước, trọng lượng và mục đích khác nhau. Để chơi với những mảnh trò chơi này, thiết kế robot cần có những lắp ráp (assembly) chuyên biệt.
Lắp ráp hiệu quả và tối ưu sẽ mang lại lợi thế cạnh tranh (competitive advantage) cho robot. Phân tích chiến lược trò chơi nên là điểm khởi đầu khi quyết định thiết kế. Điều này có nghĩa là đặt câu hỏi: “Robot sẽ chơi trò chơi như thế nào?”
Một số yếu tố khác cần cân nhắc khi quyết định loại lắp ráp bao gồm:
Có bất kỳ quy tắc trò chơi (game rule) nào liên quan đến việc xử lý mảnh trò chơi hoặc thiết kế robot hay không?
Xem xét mức độ kinh nghiệm và kiến thức. Nó có phù hợp với độ phức tạp của thiết kế không?
Đánh giá lượng thời gian có sẵn để hoàn thành lắp ráp, có đủ thời gian để hoàn tất không?
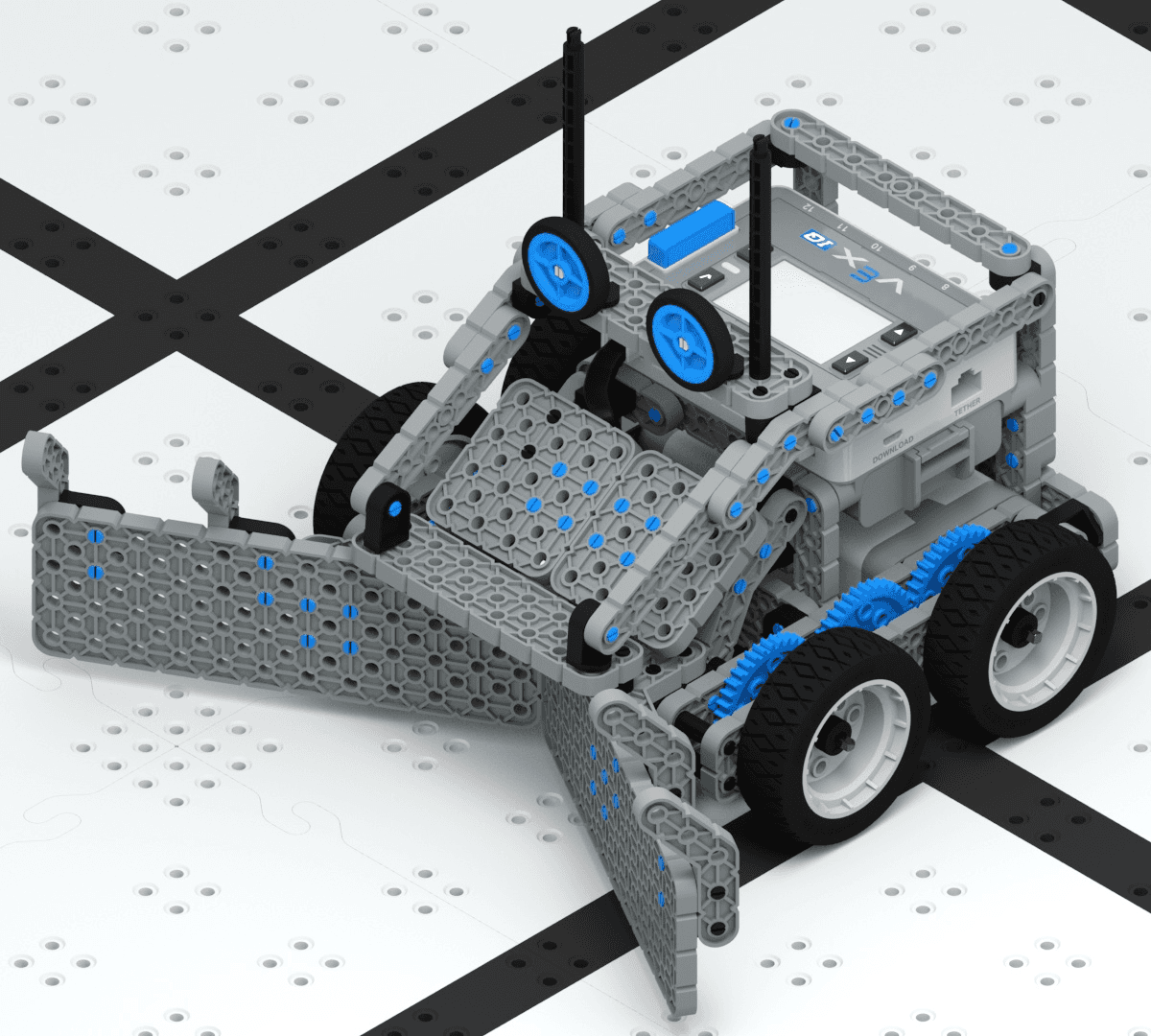
Ví dụ, trong VEX IQ Challenge 2019–2020 (tựa đề trò chơi: Squared Away), một plow (cày) có thể được gắn nhanh và dễ dàng vào drivetrain (hệ truyền động) giúp robot đẩy Cube game pieces (các mảnh hình Khối) vào Scoring Zones (vùng ghi điểm). Trong khi đó, lắp linear lifts (bộ nâng dạng tuyến tính) ở cả hai bên robot để mang hai khối cùng lúc và đặt lên các Platforms (bệ đặt), kết hợp với một roller claw (móng vuốt lăn) để nhặt và ghi điểm các quả bóng sẽ đòi hỏi nhiều thời gian lên kế hoạch và lắp ráp hơn nhiều.
Một trong những ưu điểm của hệ thống xây dựng bằng nhựa VEX (VEX plastic construction system) là nó cho phép nhiều thiết kế khác nhau và cơ hội sáng tạo gần như vô hạn. Điều này cho phép sự đa dạng lớn của các loại lắp ráp khác nhau và rất có thể xuất hiện những thiết kế mới mà trước đây chưa từng được lắp ráp. Để cung cấp một điểm khởi đầu, phía dưới đây là một số mô tả về các lắp ráp khác nhau có thể được sử dụng để chơi trò chơi.
Lắp ráp thụ động (Passive Assemblies)
Passive Assemblies là những lắp ráp không sử dụng động cơ (motor). Nhiều quy tắc trong các trò chơi robot giới hạn số lượng động cơ mà một robot có thể sở hữu. Việc thiết kế một lắp ráp thụ động cho phép các động cơ của robot được sử dụng cho những chức năng khác.
Passive Assemblies di chuyển bằng cách được gắn vào một drivetrain hoặc lắp ráp khác sử dụng động cơ. Chúng cũng có thể chứa năng lượng dự trữ từ Rubber Bands (dải cao su).
Passive Assemblies có thể là một trong những loại thiết kế dễ dàng và nhanh chóng nhất để lắp ráp, mặc dù chúng có thể rất phức tạp với các cơ chế giải phóng thủ công và thiết lập lại.
Một số ví dụ về các manipulator thụ động (passive manipulators) có thể được sử dụng để chơi một trò chơi robot gồm có:
Plows (cày): Thường được gắn vào drivetrain và chức năng chính là đẩy các mảnh trò chơi xung quanh và/hoặc giữ cho robot không leo lên các mảnh trò chơi và bị kẹt.
Forks và hooks (nĩa và móc) (các loại passive claws – móng vuốt thụ động): Thường được gắn vào arm (cánh tay) và được thiết kế để trượt dưới mảnh trò chơi để nhặt hoặc móc vào thanh để robot có thể tự nâng chính nó.
Shields (khiên): Được thiết kế để giữ các mảnh trò chơi không rơi vào bên trong robot.
Game piece slides (máng trượt mảnh trò chơi): Được thiết kế để cho các mảnh trò chơi trượt ra khỏi máng và vào goal hoặc scoring zone (vùng ghi điểm).
Plow | Fork | Hook |
 | 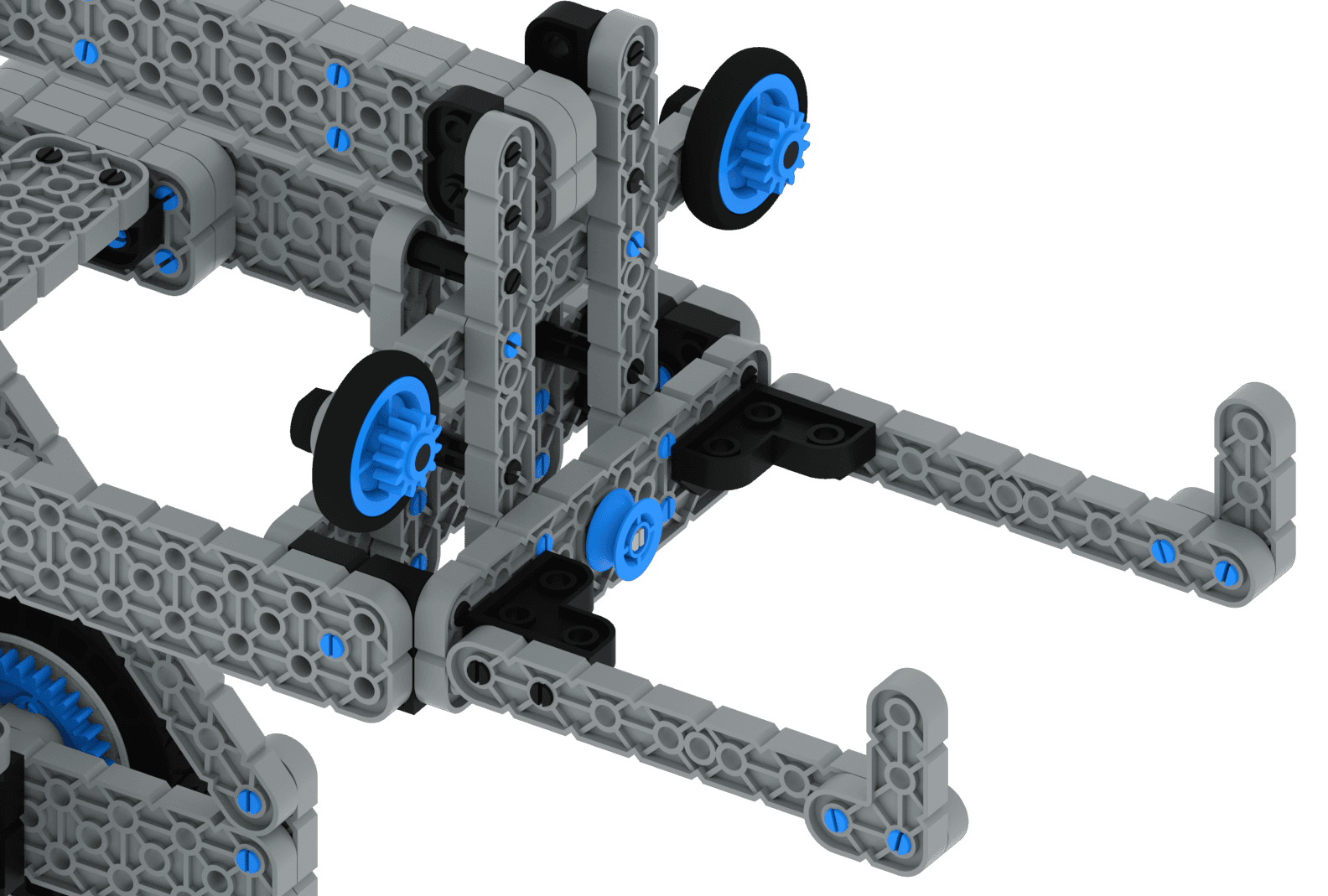 |  |
Lắp ráp sử dụng động cơ (Motor-Driven Assemblies)
Các Motor-Driven Assemblies có thể có một động cơ (motor) quay trực tiếp một lắp ráp gắn vào shaft (trục) hoặc được lắp kết hợp với gear train (hệ bánh răng), chain and sprocket system (hệ xích và đĩa xích), hoặc các bộ phận khác có sẵn trong dòng sản phẩm Motion Product line (dòng sản phẩm chuyển động).
Thông thường, lắp ráp sử dụng động cơ yêu cầu nhiều thời gian và kế hoạch hơn so với lắp ráp thụ động.
Một số ví dụ về các thiết kế có thể được sử dụng trong trò chơi robot gồm:
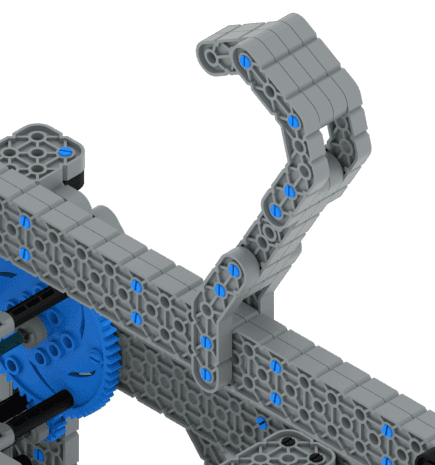
Arms (cánh tay): Thường được gắn vào tower (tháp) trên chassis (khung) robot và được dùng để nâng một lắp ráp khác ở đầu cánh tay hoặc để nâng robot khỏi mặt đất.
Claws (tay gắp): Thường gắn ở đầu cánh tay và được sử dụng để grasp (nắm bắt – grasping) một đối tượng.
Basket/ collectors (giỏ/thu gom): Được thiết kế để chứa nhiều mảnh trò chơi cùng lúc.
Lifts (bộ nâng): Được lắp để nâng các lắp ráp khác theo phương thẳng đứng hoặc nâng robot khỏi mặt đất.
Roller intakes và conveyor belts (hệ hút lăn và băng chuyền): Được sử dụng để pick up game pieces (nhặt mảnh trò chơi).
Arm | Claw | Sample Roller Intake |
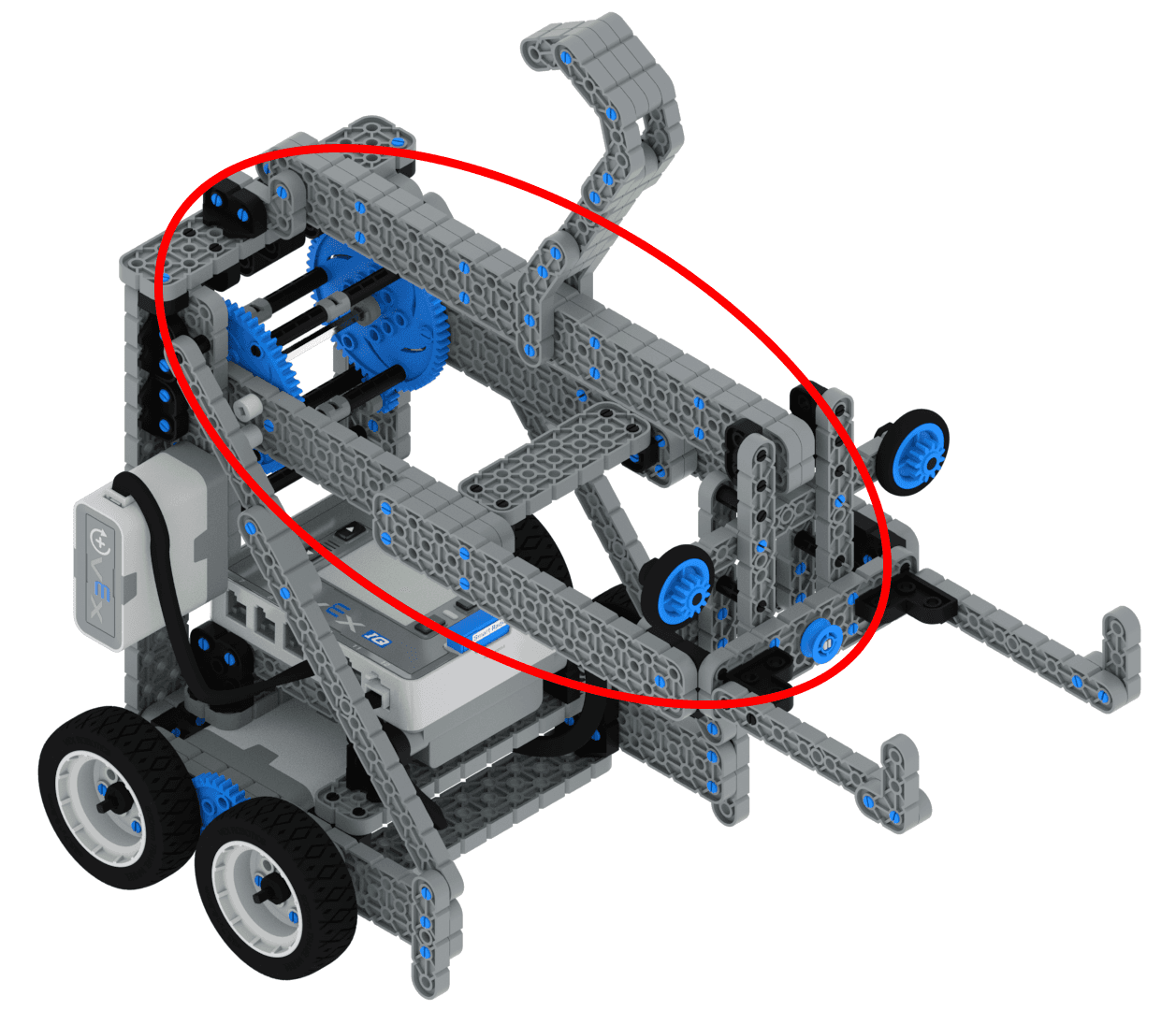 | 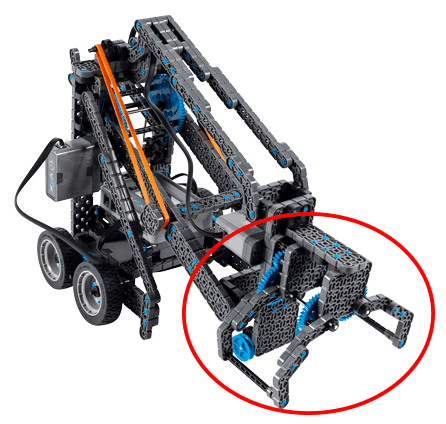 | 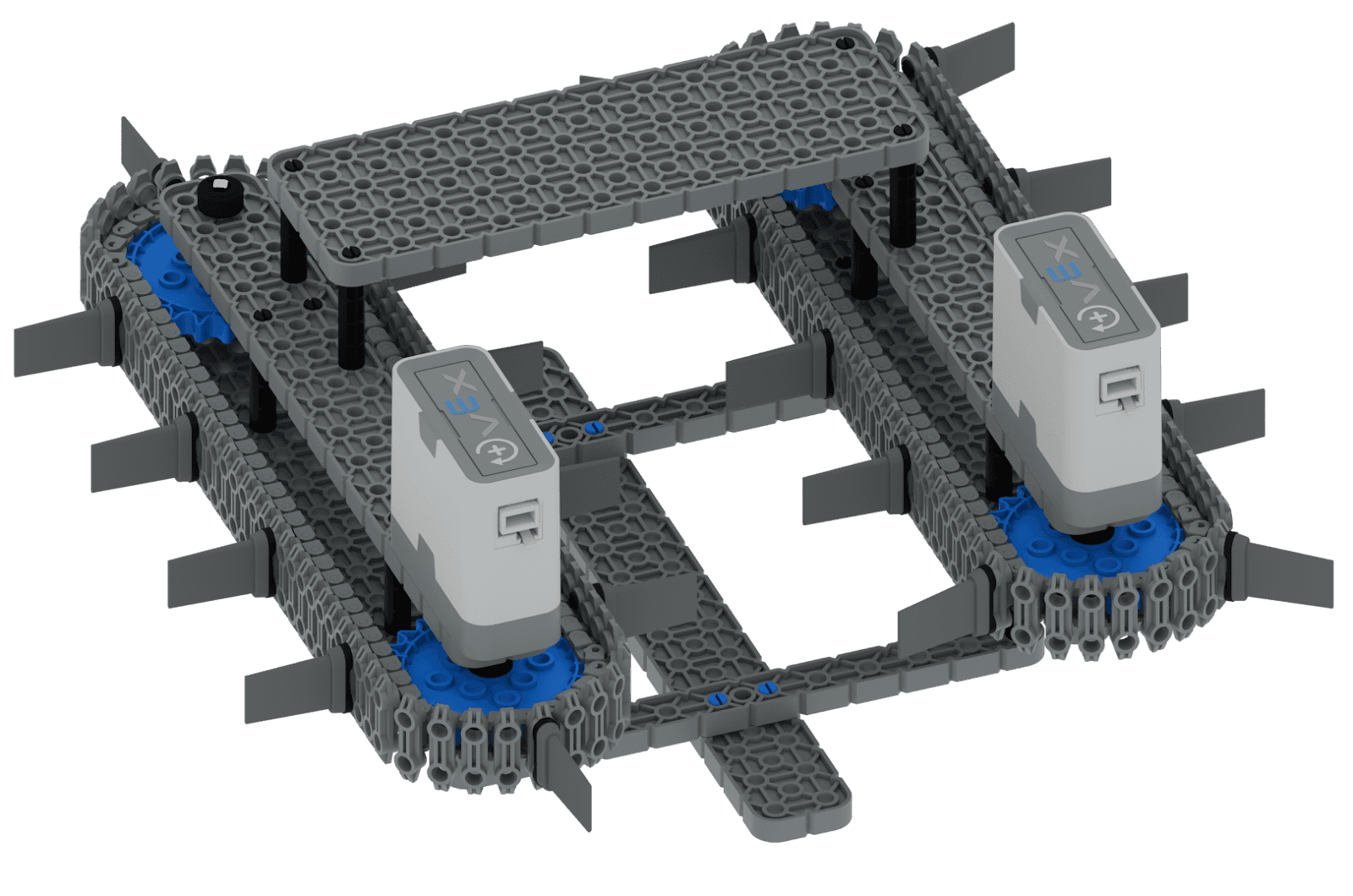 |
Thiết kế một lắp ráp cho game piece
Mỗi trò chơi có những yêu cầu riêng độc đáo đối với việc chơi. Không tồn tại một thiết kế “đúng” duy nhất cho bất kỳ trò chơi nào, mặc dù có những lắp ráp mang tính cạnh tranh hơn. Những lắp ráp cạnh tranh nhất thường là những thiết kế hoạt động hiệu quả, nhanh chóng và nhất quán.