


Một hệ thống truyền động (drivetrain) cho phép robot di chuyển bằng cách sử dụng bánh xe, tank tread (băng xích) hoặc phương pháp khác. Một drivetrain đôi khi còn được gọi là drivebase (đế lái). Xác định loại drivetrain nào sẽ được sử dụng là một trong những cân nhắc đầu tiên khi thiết kế robot.
Drivetrain của VEX IQ Clawbot là phù hợp để bắt đầu, nhưng các thiết kế drivetrain bổ sung có thể cho robot nhiều chức năng hơn — ví dụ như di chuyển sang bên cạnh ngoài việc quay và di chuyển tiến/lùi. Kiểu chuyển động này gọi là omni-directional (đa hướng/đa tuyến). Drivetrains có thể cũng cần thiết để vượt chướng ngại vật. Robot được thiết kế để chơi trò chơi có thể đạt lợi thế cạnh tranh (competitive advantage) bằng cách chọn một drivetrain phù hợp với chiến lược trò chơi của họ.
Một số Điều Cần Cân Nhắc khi Chọn Drivetrain cho Robot Thi Đấu
Robot có chướng ngại vật trên sân mà cần vượt qua hoặc leo lên không? Tank tread (băng xích) hoặc bánh xe đường kính lớn có thể giúp vượt chướng ngại vật.
Drivetrain đa hướng (omni-directional) có mang lại lợi thế lớn không?
Drivetrain có cần phải đẩy nhiều game pieces (mảnh trò chơi) nặng, hay cần di chuyển nhanh? Vận tốc tối đa hoặc mô-men xoắn (torque) sinh ra bởi drivetrain có thể được điều chỉnh bằng cách thay đổi gear ratio (tỉ số truyền) và/hoặc đường kính bánh xe.
Robot sẽ vươn cao và vươn xa tới đâu? Robot có cần phạm vi hoạt động lớn không? Robot cần chiều rộng cơ sở (footprint) lớn và trọng tâm (center of gravity) thấp sẽ lợi hơn; bánh xe nhỏ hơn có thể giúp cả hai điều này.
Có bao nhiêu động cơ cần dành cho chức năng khác ngoài drivetrain? Một số quy tắc trò chơi giới hạn số lượng động cơ trên robot.
Những cân nhắc này là ví dụ của quá trình phân tích nên được dùng khi chọn drivetrain cho robot trong lớp học hoặc robot thi đấu VEX IQ Challenge.
Mô Tả Một Số Loại Drivetrain
Standard Drive
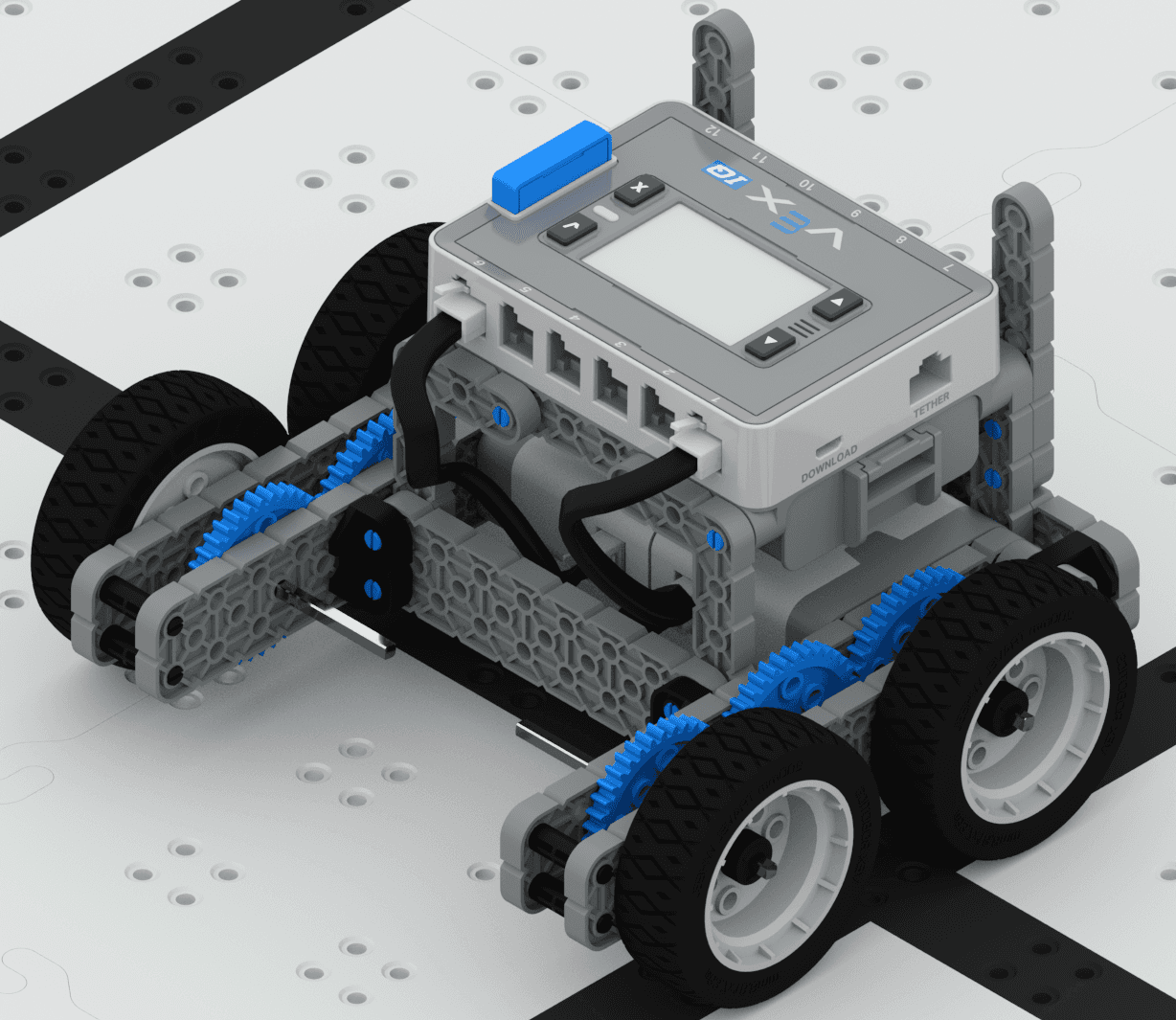
Standard Drivetrain còn được gọi là skid steer drive (lái trượt) và là một trong những kiểu drivetrain phổ biến nhất. Drivetrain chuẩn có thể được điều khiển bởi hai động cơ (motors); những động cơ này có thể truyền lực trực tiếp lên bánh xe dẫn động hoặc nằm trong một gear train (hệ thống bánh răng) với nhiều bánh xe dẫn động. Drivetrain có thể được thiết kế để có nhiều động cơ và nhiều bánh xe hơn — đôi khi gọi là four-wheel drive (4WD), six-wheel drive (6WD), v.v. Drivetrain này có thể sử dụng nhiều loại bánh nhựa VEX khác nhau. Tuy nhiên, nó không có khả năng di chuyển omni-directional (đa hướng).
H Drive
H Drive sử dụng ba hoặc năm động cơ với bốn bánh xe Omni-Directional (đa hướng) 200mm và một bánh omni 200 mm thứ năm đặt vuông góc giữa các bánh còn lại của drivetrain. Cách bố trí bánh xe này cho phép drivetrain trở thành omni-directional. Tuy nhiên, bánh ở giữa có thể bị vướng vào chướng ngại vật khi robot cố lăn qua.
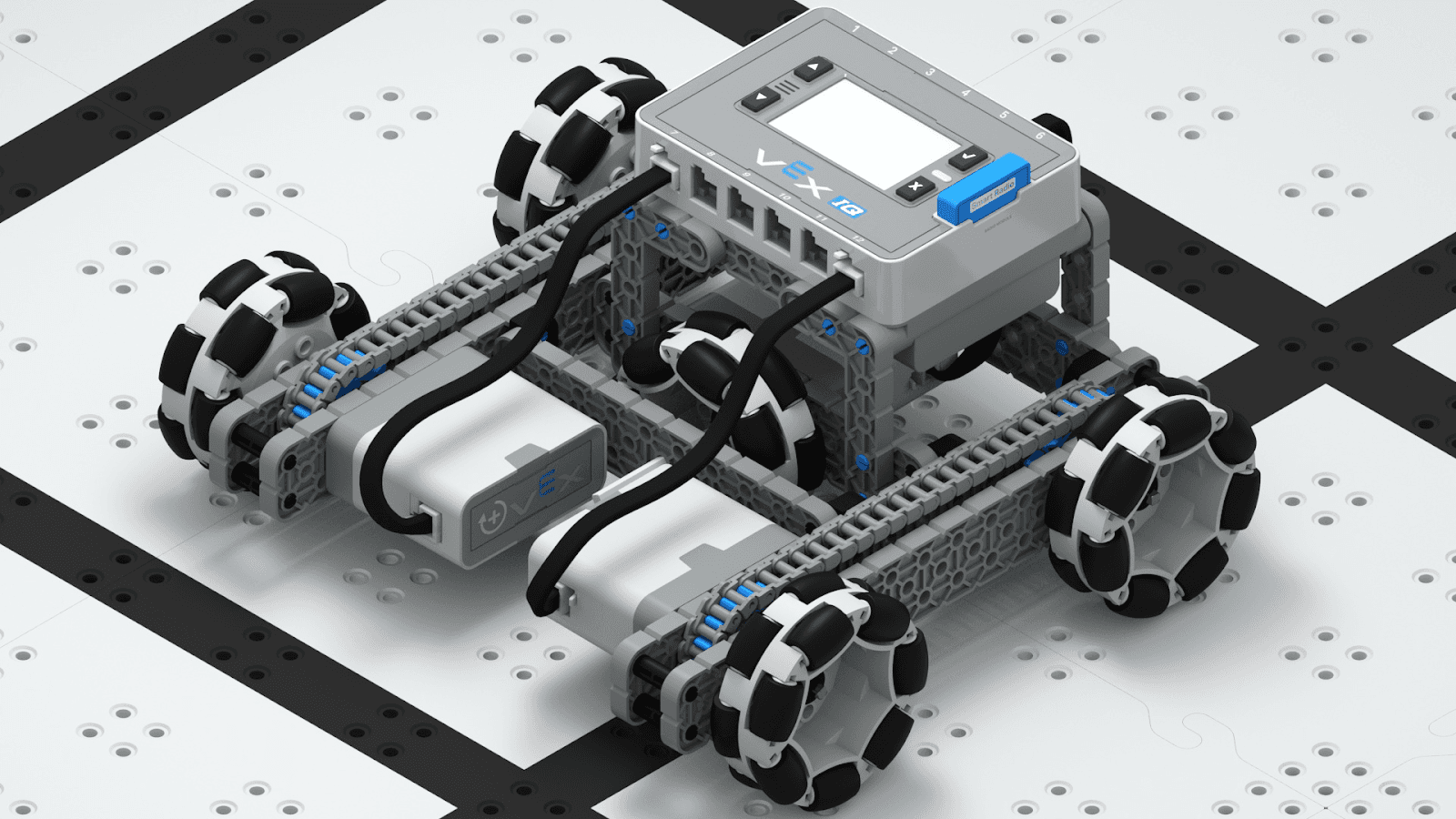
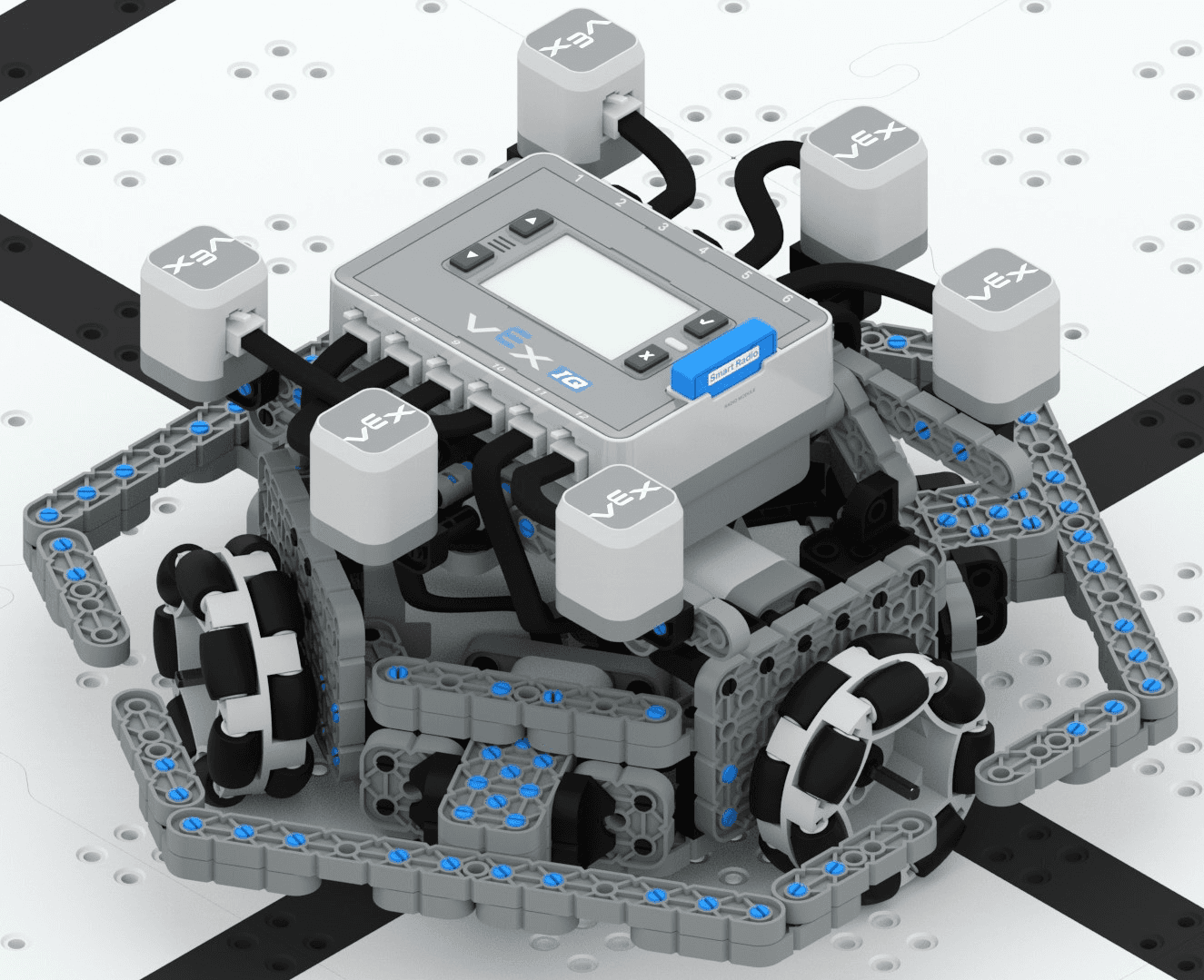
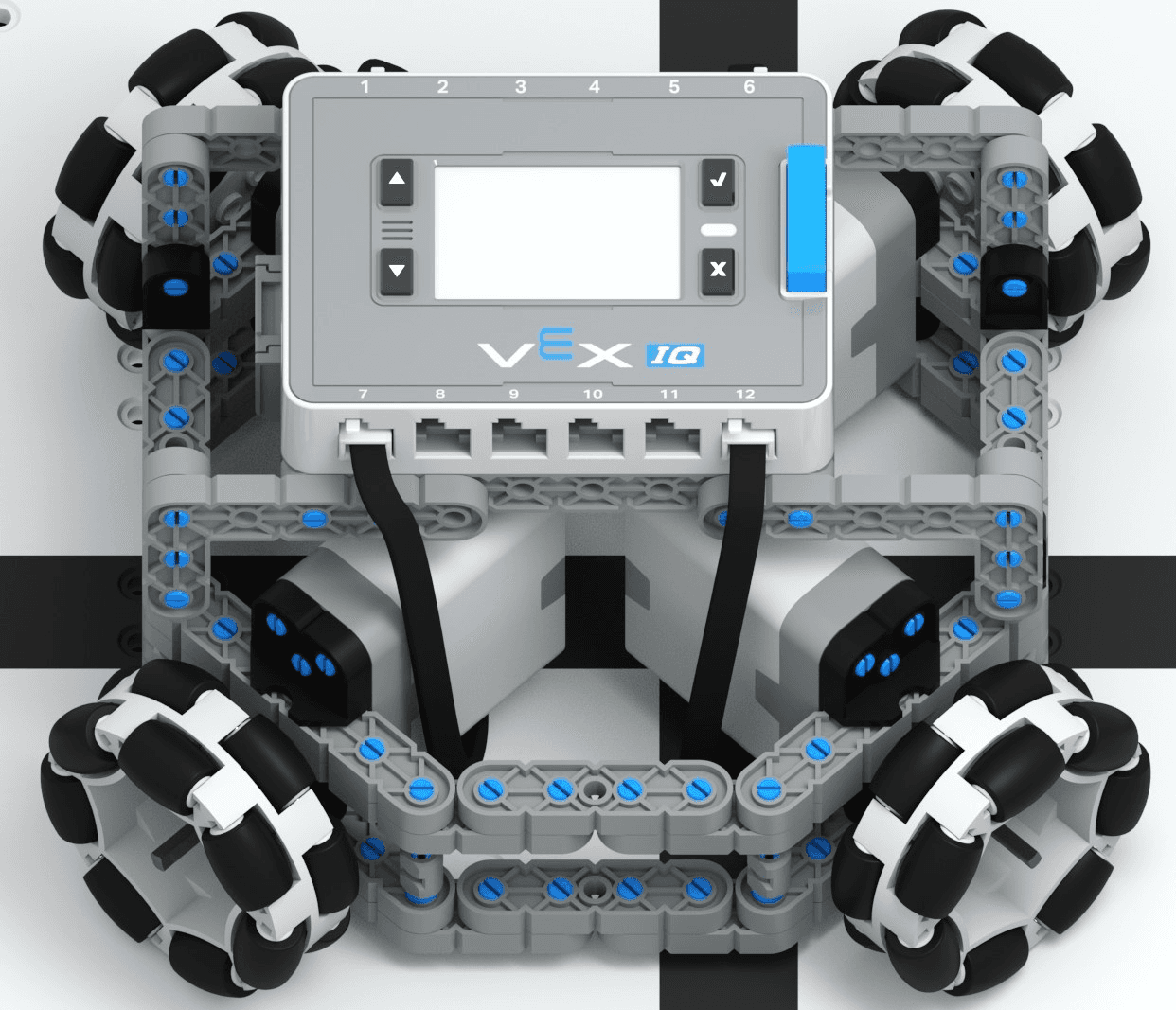
Holonomic
Drivetrain Holonomic là omni-directional. Thiết kế này có thể được lắp ráp với ba bánh Omni-Directional 200mm và ba Smart Motors (động cơ thông minh) hoặc với bốn bánh Omni-Directional 200mm và bốn Smart Motors.
Phiên bản ba bánh được lắp với các bánh tại các góc 120° so với nhau. Hướng dẫn dựng Kiwi drive thuộc loại này.
Phiên bản bốn bánh có thể được lắp bằng cách nghiêng bánh ở các góc (đôi khi gọi là X drive) hoặc đặt bánh ở trung tâm mỗi cạnh của khung lái.
Drivetrains Holonomic yêu cầu chương trình điều khiển phức tạp hơn so với Standard Drive. Drivetrain 3 bánh không ổn định bằng 4 bánh.
Kiwi Drive | X Drive |
 |  |
Track Drive
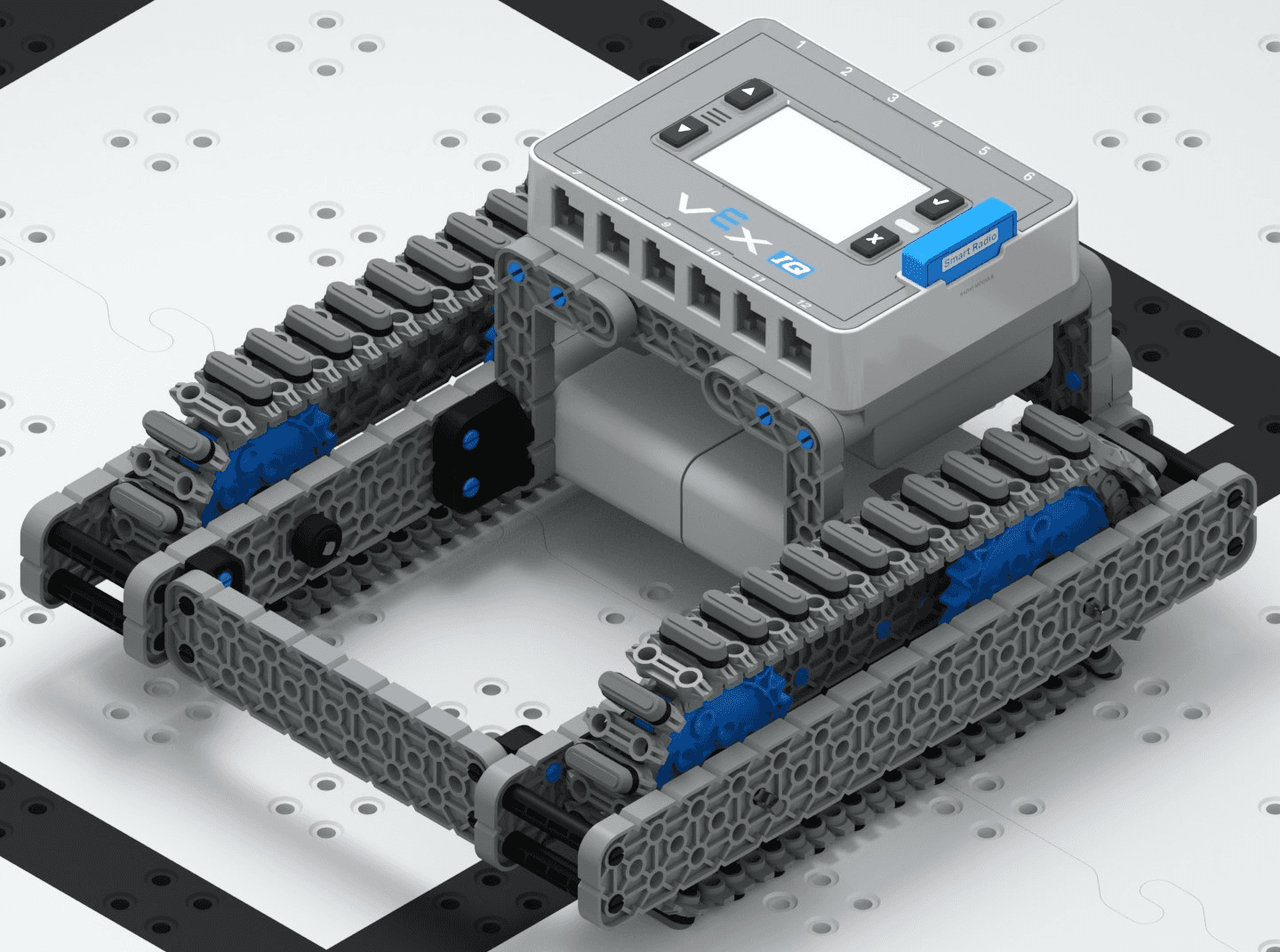
Track Drive là một biến thể khác của Standard Drivetrain sử dụng Tank Tread (băng xích) thay vì bánh xe. Tank Tread được bao gồm trong Competition Add-On Kit (bộ phụ kiện thi đấu) và có sẵn trong Tank Tread and Intake Kit (bộ băng xích và hệ hút). Track Drive dễ dàng vượt chướng ngại vật. Tuy nhiên, Track Drive không có khả năng omni-directional. Các traction links (liên kết lực kéo) từ Tank Tread và Intake kit có thể được thêm vào băng xích để tăng độ bám. Băng xích được dẫn động bởi các sprockets (nhông) bằng nhựa VEX
Bảng So Sánh Một Số Loại Drivetrains
Standard Drive | H Drive | Holonomic | Track Drive | |
Yêu cầu Động cơ tối thiểu | 2 | 3 | 3 | 2 |
Bánh xe | Omni và/hoặc Lực kéo (Traction) | Omni | Omni | Băng xích (Tank Tread) |
Omni-directional (Đa hướng) | Không | Có | Có | Không |
Cấp độ lập trình | Cơ bản → Trung cấp | Trung cấp | Nâng cao | Cơ bản → Trung cấp |
Khả năng vượt chướng ngại vật | Rất tốt | Kém | Trung bình | Tuyệt vời với Traction Links |
Nguy cơ An Toàn: Điểm Kẹp (Pinch Points)
Trước khi cấp nguồn robot, hãy di chuyển chậm các bánh xe, nhông (sprockets) và bánh răng để đảm bảo không có dây, ống, vật liệu đàn hồi hoặc phần cứng nào bị kẹt trong chuyển động.
