Các loại Odometry
1. Các mô hình triển khai Odometry
A. Drive Encoder Localization (Sử dụng encoder gắn liền với bánh xe)
Hệ thống đơn giản nhất trong odometry là drive encoder localization. Đây là việc sử dụng các encoder đo độ xoay của motor truyền động. Ta có thể đọc dữ liệu encoder và đưa vào công thức động học (kinematic equation) cho khung truyền động cụ thể để suy ra vận tốc thân (body’s velocity). Drive encoder localization thường khá đơn giản, dễ thiết lập vì hầu hết các motor hợp lệ trong FTC đều có encoder tích hợp. Thiết lập drive encoder localization là vấn đề chỉ cần nối dây, không cần phần cứng bổ sung.
Nhiều đội trong cộng đồng đã đi đến một giải pháp riêng biệt mà hiếm thấy bên ngoài FTC: sử dụng “dead wheels”, “tracking wheels”, hoặc “odometry pods”. Đây là các bánh nhỏ không truyền động gắn kèm với encoder sensor. Thường dùng hai hoặc ba odometry pods có lò xo để đảm bảo theo dõi chính xác.
B. Dead wheels
Khái Niệm:
Dead Wheel (Bánh xe chết):
Một bánh xe nhỏ không được truyền động (thường là bánh omni), theo dõi quãng đường robot di chuyển thông qua encoder gắn trên trục bánh xe.
Thường sẽ có hai hoặc ba bánh – một hoặc hai bánh theo trục x và y để theo dõi vị trí trước-sau và trái-phải so với điểm khởi đầu. Thông thường, ở bánh odometry được gắn lò xo để bánh luôn tiếp xúc với mặt sàn (floor tiles) nhằm đảm bảo độ chính xác.
Thiết kế hai bánh (Two-Wheel Design) sử dụng một odometry pod song song và một pod vuông góc (song song/vuông góc với trục bánh xe truyền động), đo chuyển động theo x và y tương ứng. Thay đổi hướng (heading) được đo bởi gyroscope (con quay hồi chuyển).
Thiết kế ba bánh (Three-Wheel Design) sử dụng hai pod song song và một vuông góc, đo chuyển động theo x và y tương ứng. Tuy nhiên, thiết kế này loại bỏ gyroscope, thay vào đó
2. Điểm mạnh và điểm yếu của từng mô hình odometry
A. Drive Encoder Localization (Odometry sử dụng các encoder)
Ưu điểm:
Rẻ (có thể motor bạn đang dùng đã có encoder)
Dễ tiếp cận
Cấu hình rất ít
Nhược điểm:
Drive encoder localization trên mecanum drive có thể khá kém chính xác do thiếu độ bám của bánh xe trong quá trình di chuyển.
Sẽ trượt bánh khi gia tốc cao trên cơ cấu mecanum. Độ chính xác sẽ đủ cho chế độ autonomous cơ bản nếu giới hạn gia tốc.
Two-Wheel Odometry Pods
Ưu điểm:
Rẻ hơn thiết kế ba bánh
Độ chính xác khá tốt
Không cần hiệu chỉnh hướng
Nhược điểm:
Dễ trượt hơn so với thiết kế ba bánh
Three-Wheel Odometry Pods
Ưu điểm:
Theo dõi tương đối chính xác. Độ chính xác cao trong 30 giây tự động so với loại 2 bánh
Nhược điểm:
Khá tốn kém
Việc hiệu chỉnh hướng rất quan trọng
Rotary encoders
Phương pháp xác định vị trí robot Odometry phụ thuộc khá nhiều vào đầu vào từ encoders. Encoders là cảm biến theo dõi “counts” hay “ticks”, là các giá trị đại diện cho một lượng xoay nhất định. Các encoder khác nhau có số số xung đếm tạo ra trong một vòng quay đầy đủ (360°) của trục (counts per revolution - CPR) khác nhau. Số counts cao hơn thì dữ liệu càng chính xác.
Encoders được cắm vào cổng JST-PH trên REV Hubs. Có thể là encoder tích hợp vào motor hoặc là encoder lắp ngoài. Encoder lắp ngoài vẫn cần cắm vào cổng encoder nhưng không liên quan đến motor tại cổng đó. Qua phần mềm, ta có thể dùng đối tượng motor để xác định vị trí của encoder. Điều này nên làm với motor không gán encoder.
Nếu bạn dùng dead wheels, bạn không cần dùng các cổng encoder motor truyền động, nên có thể dùng cho dead wheels.
Nếu chọn thiết kế dead wheels, chỉ có hai encoder được khuyến nghị dùng cho FTC:
REV Through-Bore Encoders
U.S. Digital S4T Encoders
REV Through-Bore
Thông thường gọi tắt là “REVcoders” hay “revcoders”, REV Through-Bore encoder nhanh chóng trở thành lựa chọn mặc định trong cộng đồng FTC. REV encoder nổi tiếng nhờ giá cả tương đối hợp lý, độ tin cậy cải thiện nhiều, và dễ sử dụng. Thiết kế through-bore là cải tiến vượt trội so với các cấu trúc encoder đĩa quang (optical disc) trước đây. Encoder đĩa quang rất dễ hỏng, dễ xước, và kém chịu lỗi thiết kế.
Ưu điểm:
Thiết kế through-bore rất bền và dễ thiết kế
Giá tương đối rẻ
CPR cao
Dễ đấu dây
Nhược điểm:
Kích thước khá lớn so với các encoder khác, có thể gây khó cho thiết kế nhỏ gọn
Nhiều encoder Through-Bore ban đầu cảm thấy có sự chống nhẹ, không đều khi xoay. REV nói đây là bình thường và sẽ giảm dần khi encoder mòn (wear in)
*Ghi chú:
Through-Bore encoder có CPR(Counts Per Revolution - Số đếm trên vòng) rất cao (~8k). REV Hub truyền velocity là số nguyên 16-bit dấu. Có nghĩa có thể truyền tối đa giá trị 2^15 = 32768. Do đó, chỉ cần 4 vòng quay mỗi giây (32768 / 8000 = 4) là giá trị velocity trên REV Hub có thể tràn số. Điều này chủ yếu là mối quan tâm khi xử lý motion profiling.
Các công cụ phổ biến hiện nay (Road Runner và FTCLib) đã có cơ chế giải quyết vấn đề này, nên không cần quá lo, chỉ cần nhớ chi tiết này khi bắt đầu lập trình.
U.S. Digital S4T
Encoder trục thu nhỏ (miniature shaft encoder) S4T là một lựa chọn khác dùng trong thiết kế dead wheel. Các encoder này rất nhỏ, có thể giảm đáng kể kích thước dead wheel của bạn. Việc sử dụng truyền động cho encoder này là lý tưởng để tránh shock loads.
Ưu điểm:
Rất nhỏ gọn
Nhược điểm:
Đắt hơn (gần gấp đôi giá)
Kém bền hơn
Dây rất mỏng, dễ gãy nếu không cố định chắc.
Để hoạt động một cách lý tưởng thì cần có hệ truyền động bên ngoài
SRX Mag Encoder
Encoder từ Cross The Road Electronics (CTRE), mạch cảm ứng từ trường (magnetic encoder). Ít đội FTC dùng vì phức tạp hơn và thiếu tài liệu cụ thể cho FTC. Phổ biến hơn trong FRC.
Ưu điểm:
Rất nhỏ gọn
Giá tương đối rẻ
Nhược điểm:
Cần lắp ráp
Ít thông tin cho FTC
U.S. Digital E8T (deprecated)
Xưa từng là lựa chọn phổ biến cho nhiều đội FTC, E8T optical encoders hiện không được khuyến nghị vì REV Through-Bores có chất lượng tốt hơn ở mức giá tương đương. Thiết kế đĩa quang Open-hole của E8T gặp nhiều khuyết điểm thiết kế, dễ vỡ và gây thất vọng..
4. Thiết kế cho dead wheels
Hiếm có thiết kế dead wheel mã nguồn mở. Dead wheels thường được thiết kế dựa vào drivetrain riêng của từng đội và ít đội công khai CAD robot của họ.
Một số thiết kế dead wheel công khai:
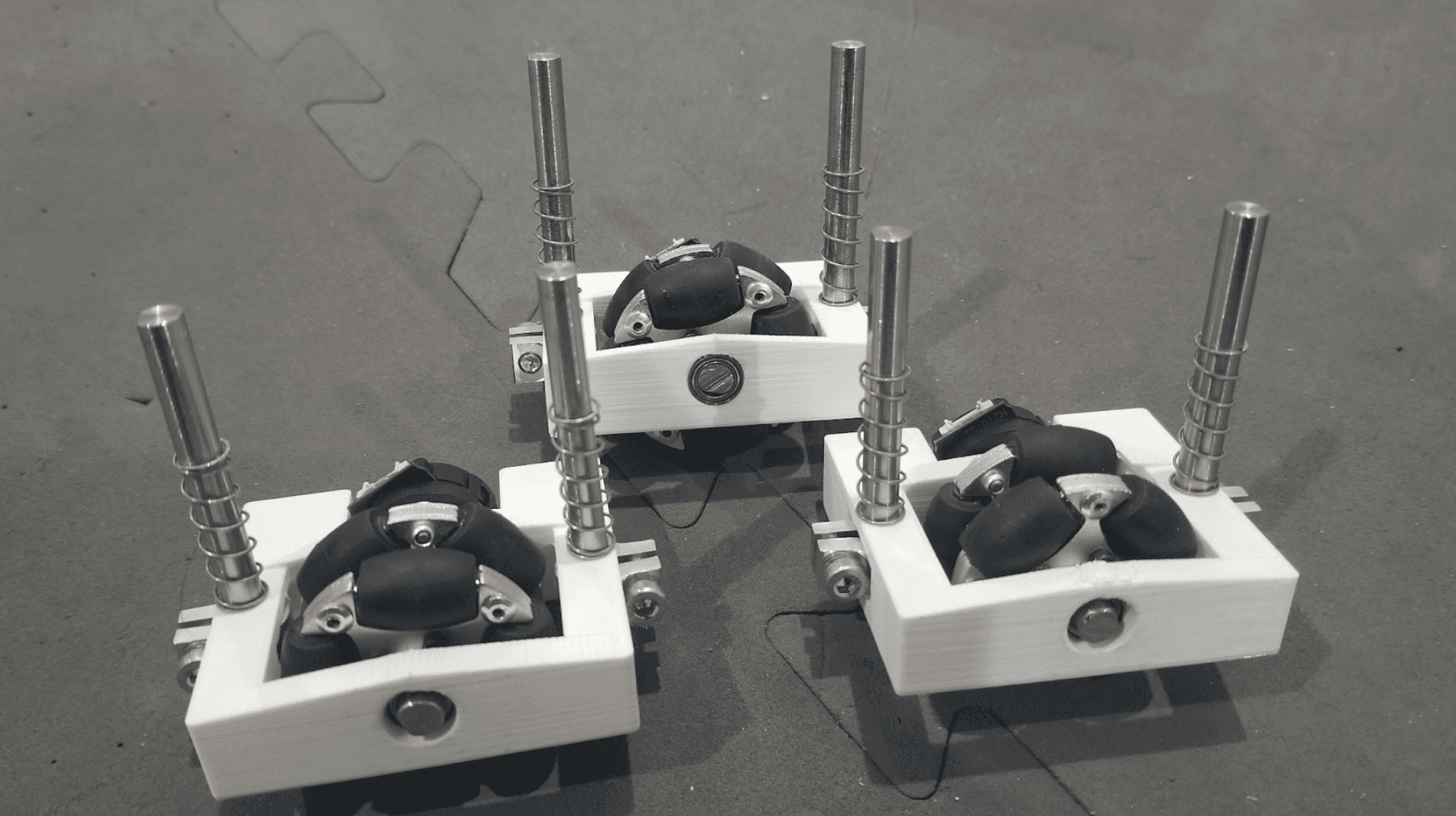
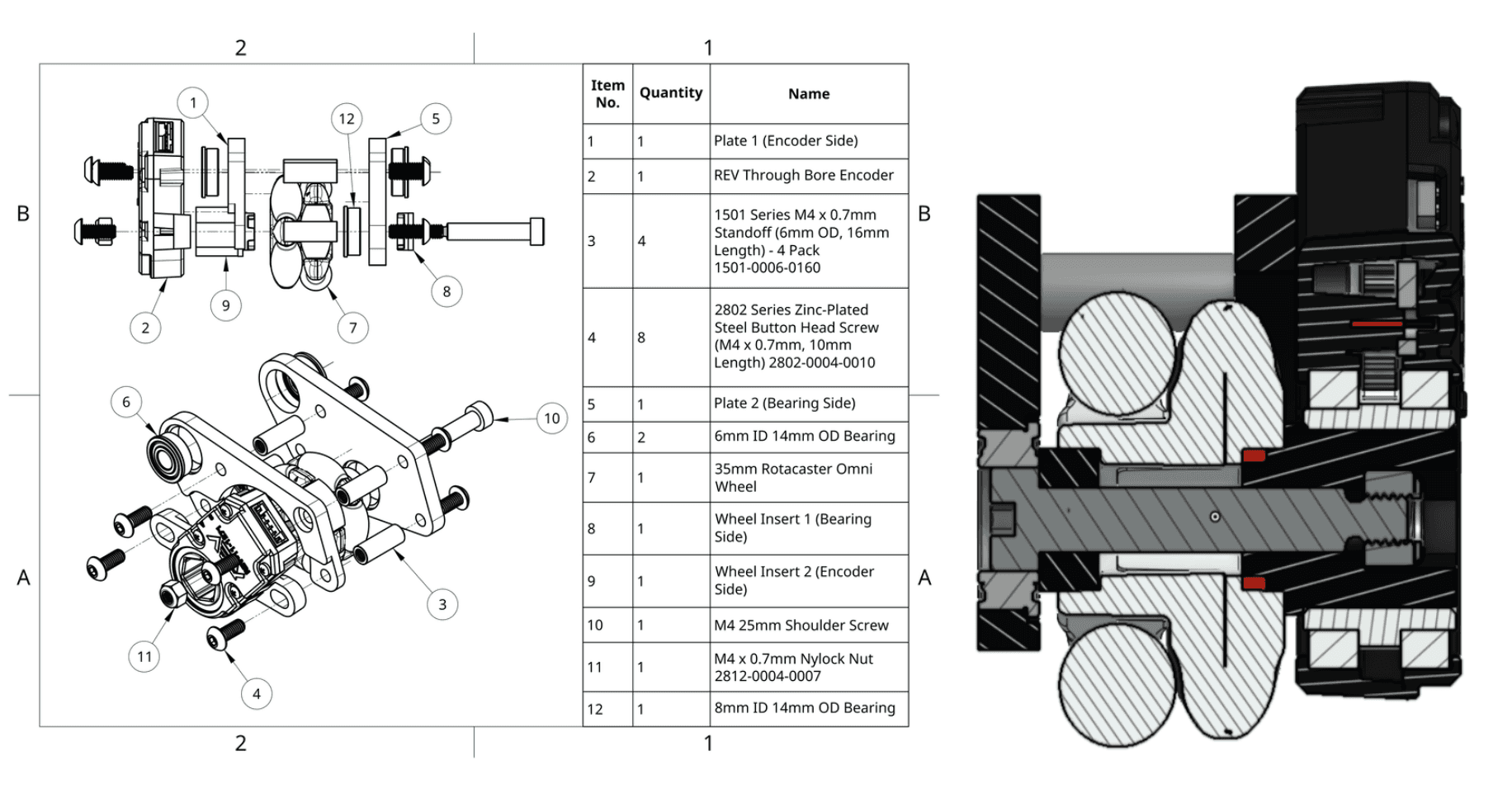
Open Odometry by 18219
Sử dụng REV Through-Bore Encoder
Thiết kế công khai phổ biến và bền
Kích thước đủ nhỏ để lắp vào kênh goBILDA
Lưu ý: sử dụng bánh Rotacaster 35 mm từ Úc. Giao hàng có thể lâu.
goREVdometry
Sử dụng REV Through-Bore Encoder
Kích thước nhỏ, phù hợp vào kênh goBILDA
Lưu ý: thông tin chỉ có qua Discord và không cập nhật nhiều gần đây.
11115 Gluten Free Design – 2019
Link CAD toàn bộ robot mùa 2018-19
Sử dụng bánh LEGO và US Digital S4T. Rất tốn kém.
9794 Wizards.exe Design
Kích thước nhỏ, vừa vào kênh goBILDA
Không khuyến nghị nữa vì dùng E8TOdometry Spell Book Part 1: Building a Modified goBILDA Strafer Chassis Kit
* Spring Tensioning (Cơ chế nén lò xo)
Khuyến nghị mạnh rằng thiết kế dead wheel của bạn nên bao gồm một dạng căng lò xo để đẩy bánh vào mặt đất. Điều này đảm bảo bánh luôn tiếp xúc mặt đất và có độ bám đủ để tránh trượt. Cần đủ lực, nhưng nếu quá mạnh có thể nhấc phần drive train nhẹ lên và làm gián đoạn việc điều khiển.
Phương pháp phổ biến nhất là cho pod xoay quanh một điểm trục và dùng lò xo hoặc dây thun để tạo lực quay.

Một tùy chọn chuyên biệt hơn là làm pod odometry nén bằng chiều dọc (vertical spring-loaded). Ý tưởng là pod sẽ chuyển động theo phương song song mặt đất khi chiều cao thay đổi. Tuy nhiên, đây không phải là vấn đề mà hầu hết đội gặp, và thiết kế này khó làm tốt, nên ít được khuyến nghị cho cải thiện nhỏ về độ chính xác.

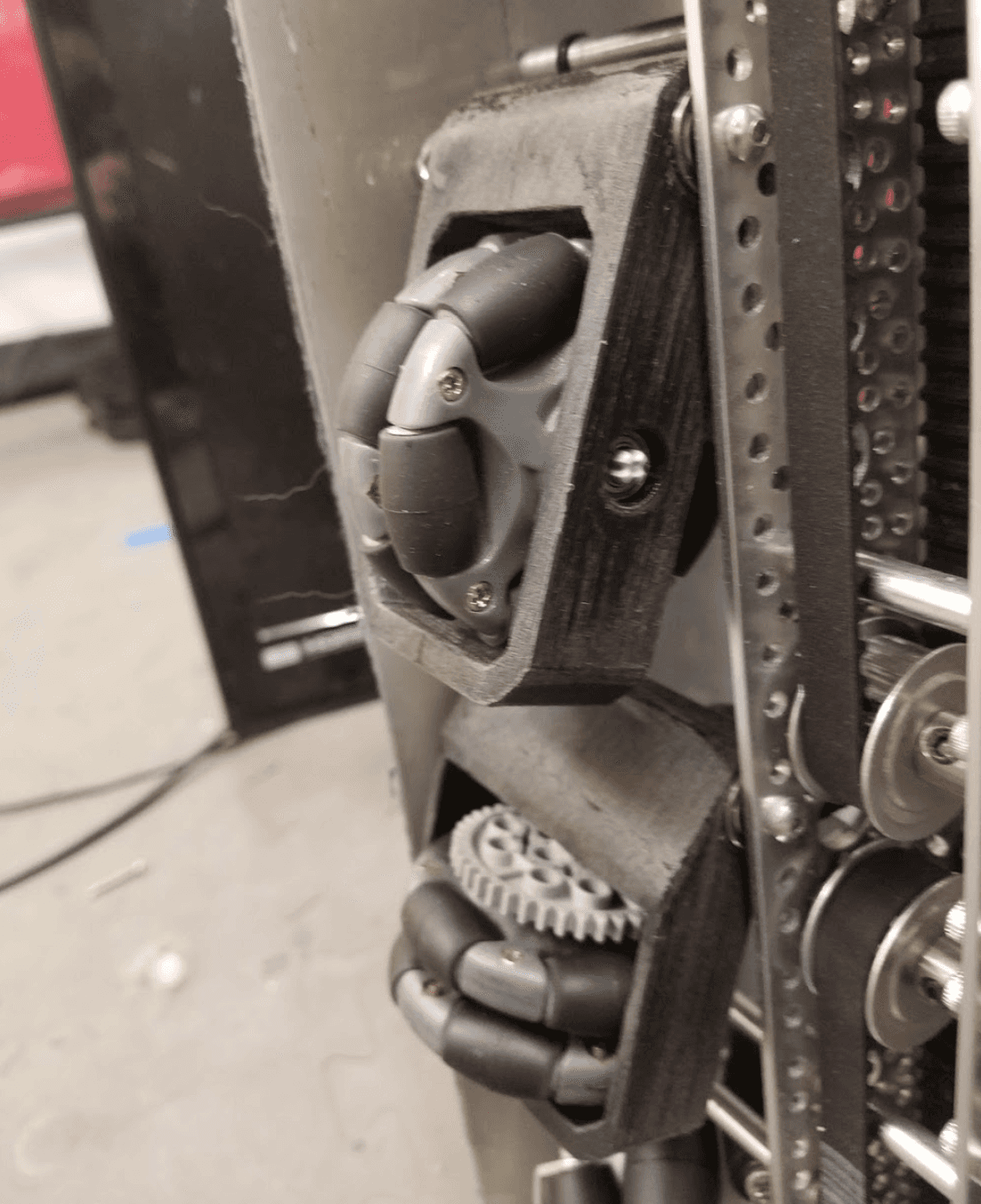
* Một số hình ảnh của encoder
FTC Team 14310 (REV Through Bore Encoder)

FTC Team 8802 (REV Through Bore Encoder)

FTC Team 14320 (US Digital S4T)

FTC Team 11115 (US Digital S4T)