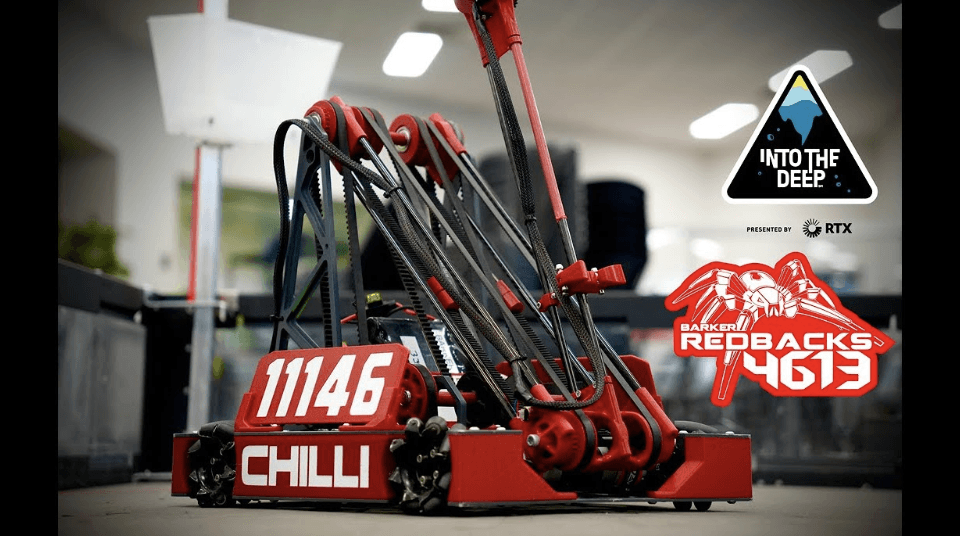
I. Cánh Tay Đơn (Single Arm):
Là loại cơ cấu cánh tay đơn giản nhất, chỉ quay trên một trục duy nhất.
Đặc điểm
• Là loại cánh tay đơn giản nhất, chỉ quay trên một trục quay.
• Tương đối dễ dàng và nhanh chóng để chế tạo.
• Cũng như cánh tay đa trục, nó có thể thêm khả năng kiểm soát khoảng cách dọc và ngang của bộ phận ở cuối.
Ưu nhược điểm về phạm vi và tải trọng:
Ưu điểm:
Dễ dàng và nhanh chóng để lắp ráp.
Nếu được sử dụng để tăng tính linh hoạt cho bộ phận cuối, yêu cầu công suất tương đối nhỏ và thường được dẫn động bằng servo thay vì motor.
Nhược điểm:
Phạm vi vươn bị giới hạn do các ràng buộc về chiều dài của khối gốc (khối khởi đầu)
Chỉ vươn được khoảng 16 inch.
Cánh tay dài cần tỷ số giảm tốc lớn để dẫn động (ví dụ: 254,5:1).
Nên truyền mô-men xoắn thông qua bánh răng, xích, hoặc đai thay vì gắn trực tiếp vào trục động cơ để tránh lực dọc trục và dễ dàng đạt được tỷ số giảm tốc lớn hơn.
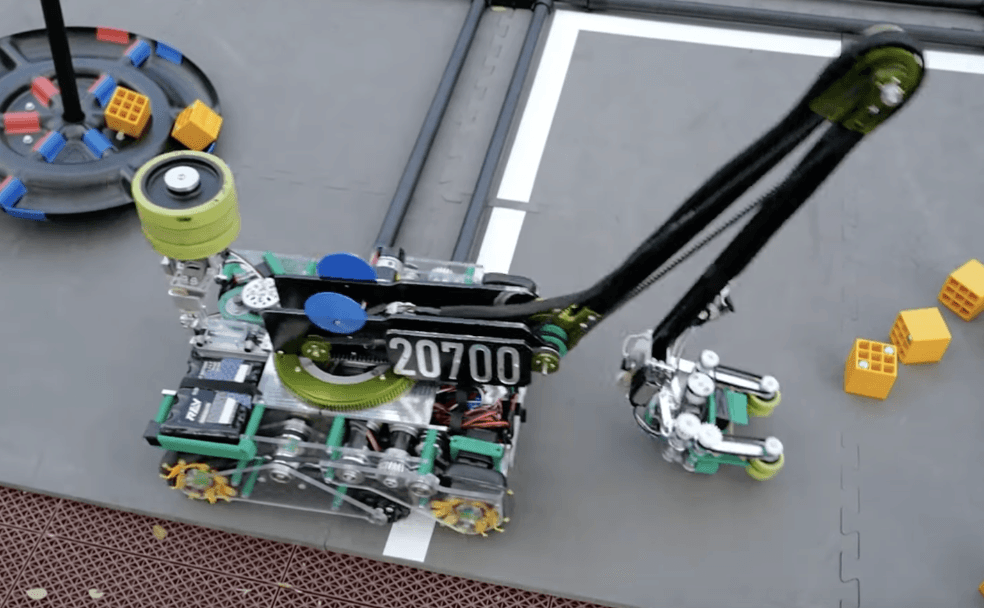
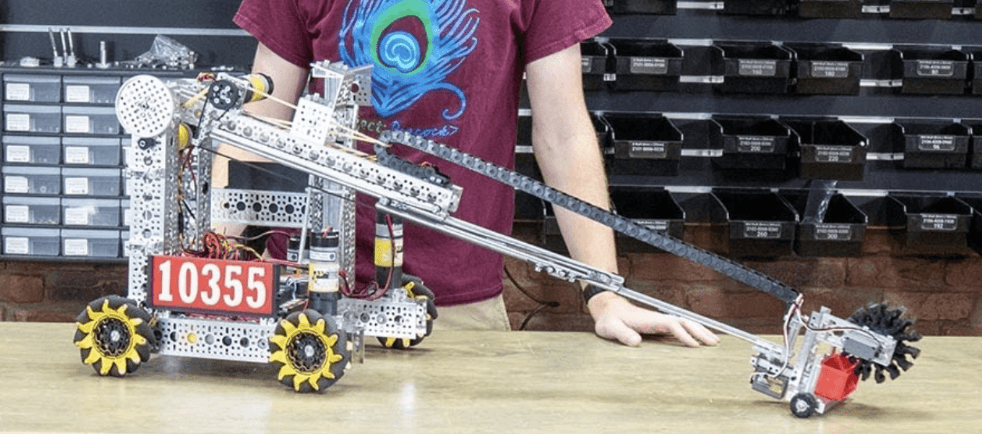
II. Cánh Tay Kép (Pivot Extension)
Là một cánh tay quay có gắn thêm một bộ phận nối dài tuyến tính.
Đặc điểm
• Là một cơ cấu kết hợp: Cánh tay quay + Bộ phận nối dài tuyến tính gắn kèm.
• Bộ phận nối dài tuyến tính thường là thanh trượt tuyến tính.
Ưu nhược điểm về phạm vi và tải trọng:
Ưu điểm:
Cho phép bộ phận nối dài tuyến tính cung cấp chiều dài mong muốn.
Hỗ trợ độ vươn cho cả chiều ngang và chiều dọc.
Nhược điểm:
Nếu Pivot Extension được thiết kế dài và mang tải lớn, nó cần tỷ số giảm tốc lớn.
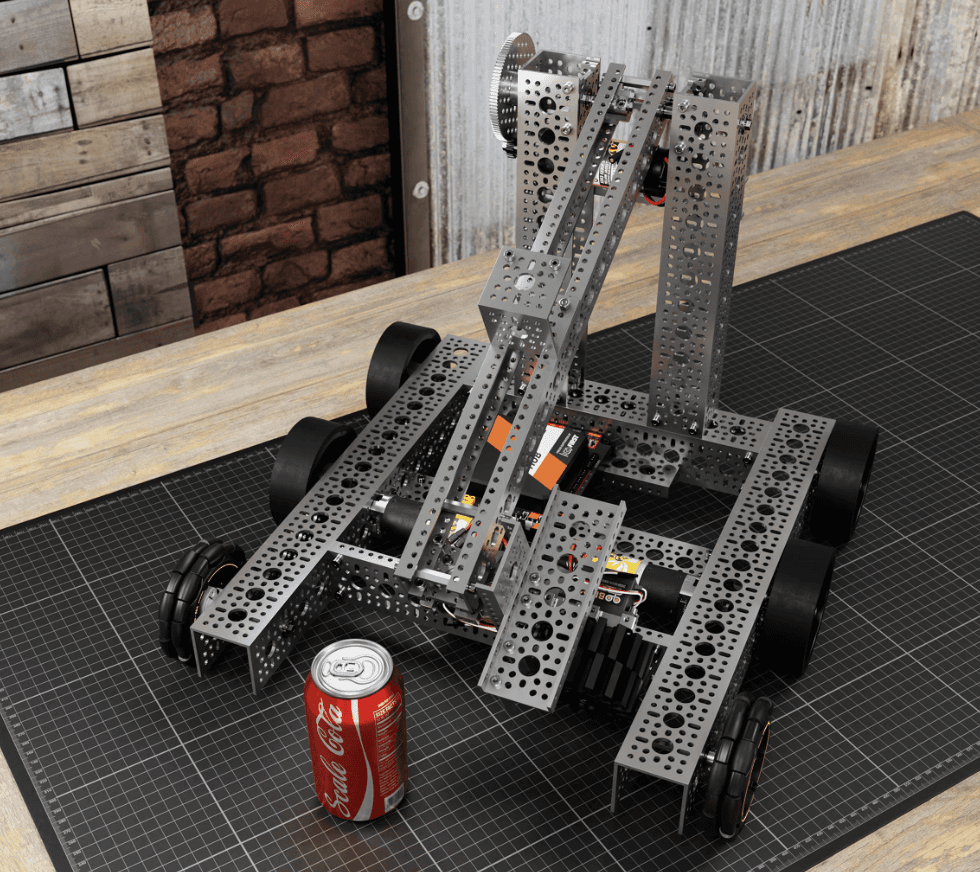
III. Nhiều bậc (trục) (Multi-Axis Arm):
Cánh tay nhiều bậc (đa trục) là cơ cấu bao gồm nhiều khớp quay.
Đặc điểm
• Bao gồm nhiều khớp quay.
• Thường được sử dụng để thêm tính linh hoạt và kiểm soát cho bộ phận ở cuối.
• Có thể thêm khả năng kiểm soát khoảng cách dọc và ngang của bộ phận cuối.
Ưu nhược điểm về phạm vi và tải trọng:
Ưu điểm:
Cung cấp độ vươn xa mà cánh tay đơn trục thiếu.
Cung cấp tính linh hoạt cao hơn nhiều trong việc định vị bộ phận cuối.
Yêu cầu công suất tương đối nhỏ khi dùng để tăng tính linh hoạt và kiểm soát cho bộ phận cuối
Nhược điểm: Rất khó thiết kế, sản xuất và điều khiển hơn nhiều so với cánh tay đơn trục.
Thường gặp các vấn đề kỹ thuật như độ chính xác
Cung cấp ít lợi ích hơn so với thanh trượt tuyến tính và các arms khác
Cần tỷ số giảm tốc lớn.